Troubleshooting
This section explains how to determine, diagnose, and fix issues that you might encounter when you use KUKA robot drivers with RoboDK.
Checking the availability of port 7000
You should enter the Expert user group on the KUKA controller to troubleshoot issues with port 7000.
1.![]() KUKA➔Configuration➔User group➔ choose Expert (password: kuka)
KUKA➔Configuration➔User group➔ choose Expert (password: kuka)
2.![]() KUKA➔Start-up➔Service➔Minimize HMI (the windows screen will appear)
KUKA➔Start-up➔Service➔Minimize HMI (the windows screen will appear)
3.Open command shell with START➔All programs➔ Accessories➔Command Prompt
or START➔Run➔cmd
4.Request a list of all connections and listening ports using the command:
netstat -a -b -n -o -p TCP | findstr :7000
5.If the response did not contain any strings, then port 7000 is free and can be used for driver operation. Subsequent steps can be skipped.
6.If the response to the command from step 4 looked like this:
TCP 0.0.0.0:7000 0.0.0.0:0 LISTENING 1840
7.The last number in the line above is the process identifier (PID). It can be used to get information about the process name using the following command (you should use your number instead of 1840):
tasklist /fi "PID eq 1840"
8.The result of the tasklist command contains information about the process that is listening on port 7000. Sample output:
Image Name PID Session Name Session# Mem Usage
========================= ======== ================ =========== ============
c3bridge.exe 1840 Console 1 5,912 K
9.If the port is occupied by KukavarProxy.exe or c3bridge.exe processes, then the system is ready to work with the selected driver. If the port is occupied by some other application, it is necessary to terminate it or change the port number for the C3 Bridge Server.
Uninstalling legacy driver
If you have been using KUKAVARPROXY and wish to upgrade to C3 Bridge Server, no specific uninstallation procedure is required. Minimize the KUKA HMI, close the KUKAVARPROXY and make sure it is not loaded automatically at system startup (no shortcut in START➔All programs➔Startup). It is not necessary to delete the KUKAVARPROXY executable file.
Configuration error
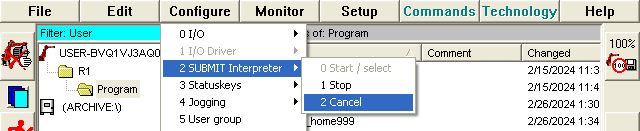
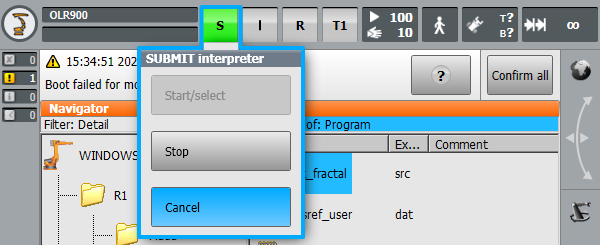
Procedures for automatic or manual configuration of the control system may fail. Most often this is due to the inability to overwrite the $config.dat file. This file can only be edited by a user with advanced privileges (expert). An additional condition is to stop all interpreters: robot and submit. To stop the robot interpreter, simply cancel any selected program, or select no programs if the control system has just been loaded. To cancel the submit interpreter, use the HMI as shown in the figures below for KRC2 and KRC4 systems, respectively:
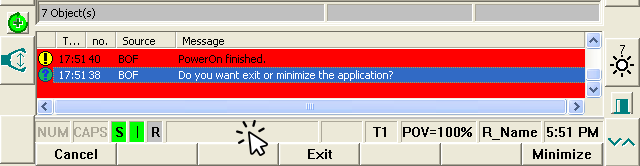
In case the $config.dat file is still locked after stopping all interpreters, you can completely stop the execution of the software part of the robot control system. In the KRC2 system, click on the rectangular area next to the status indicators (S I R) and click the Exit button:
In the KRC4 system, click on the green robot icon in the tray area and select Stop KRC:
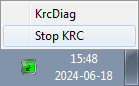
After stopping the control software, the file C:\KRC\ROBOTER\KRC\R1\System\$config.dat can be modified using any text editor. Perform a reboot of the operating system to apply the changes.