Navigation offcanvas
- Basic Guide
- Getting Started
- Interface
- Options Menu
- Robot Programs
- Robot Manufacturing
- Tips and Tricks
- Smaller/Larger References (-/+)
- Rename Object (F2)
- Show/Hide Robot Workspace (*)
- Open your last project or file (Ctrl+1)
- Show the Station Tree as a side window
- Show or Hide Objects (F7)
- Show or Hide the text on the screen (/)
- Move Reference Frames or Objects (Alt)
- Move a Robot Tool (Alt+Shift)
- Reorder Items in the Tree
- Reorder Items in the Tree without moving them
- Change the size of the Station Tree
- Teach a Robot Target (Ctrl+T)
- Modify a Robot Target (F3)
- Teach Robot Targets on a Surface
- Move Robot Targets on a Surface (Alt+Shift)
- Change the Robot Configuration
- Check the status of a Robot Program (F5)
- Faster Simulation (hold Spacebar)
- Generate a Robot Program (F6)
- Export a Simulation (Ctrl+E)
- Send a Program to the Robot (Ctrl+F6)
- Run the Program on the Robot
- Display the Robot Trace (Alt+T)
- General Tips
- Add-ins
- Add-ins
- File Manager
- Palletizing
- Computer Vision
- Display Panel
- OPC-UA
- Realistic Robot Simulation (RRS)
- Components Add-In
- Augmented Reality
- Welding Add-In
- RoboDK CNC
- IO Monitor Plugin
- Blender Export Add-in
- Plugins for CAD/CAM
- RoboDK Add-Ins for CAD/CAM Software
- RoboDK Plugin for BobCAD-CAM
- RoboDK Plugin for FeatureCAM
- RoboDK Add-In for Fusion 360
- RoboDK Plugin for hyperMILL
- RoboDK Add-In for Inventor
- RoboDK Plugin for Mastercam
- RoboDK Plugin for MecSoft
- RoboDK Add-In for Onshape
- RoboDK Add-In for Rhino
- RoboDK Add-In for Siemens Solid Edge
- RoboDK Add-In for SolidWorks
- Collision Detection
- Examples
- Robot Tips
- ABB robots
- Brooks robots
- Comau robots
- Denso robots
- Fanuc robots
- Han’s robots
- Hanwha robots
- JAKA robots
- KEBA Controllers
- KUKA robots
- Mecademic
- Yaskawa Motoman robots
- Omron-TM Robots
- Universal Robots
- Post Processors
- Virtual Reality
- RoboDK API
- Robot Drivers
- Accuracy
- RoboDK TwinTool
- RoboDK TwinTrack
- Robot Calibration (Laser Tracker)
- Robot Calibration (Optical CMM)
- Robot ballbar testing
- ISO9283 Performance Testing
See the previous section Gripper Simulation on how to properly define gripper instructions compatible with the post processor. This approach properly defines locations in the GPL project, avoiding unexpected movements of the gripper’s axis/axes.
The Brooks PreciseFlex IntelliGuide grippers available are:
1.Brooks PreciseFlex IntelliGuide s23
2.Brooks PreciseFlex IntelliGuide s60
3.Brooks PreciseFlex IntelliGuide s23D
4.Brooks PreciseFlex IntelliGuide v23
5.Brooks PreciseFlex IntelliGuide v60
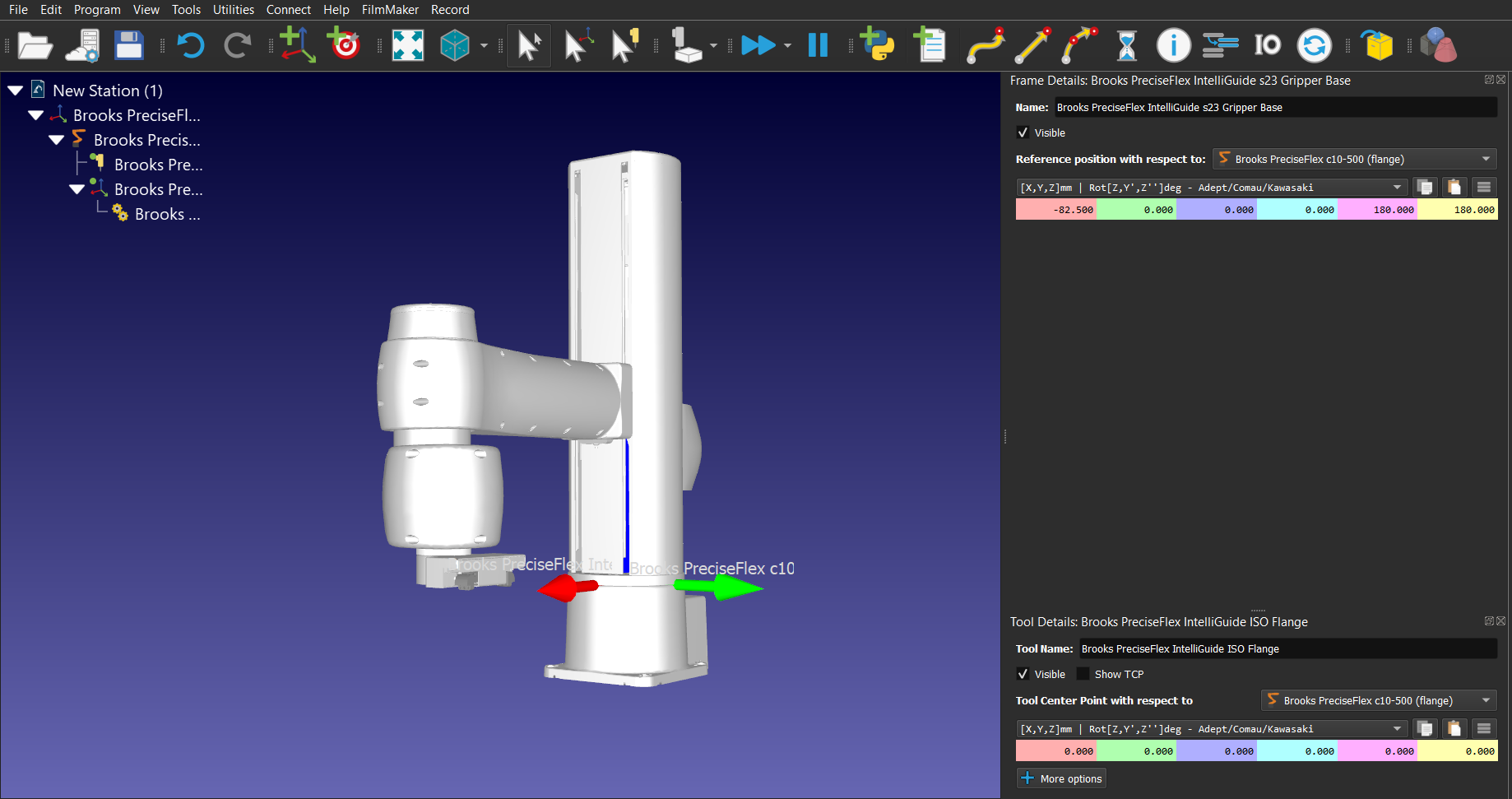
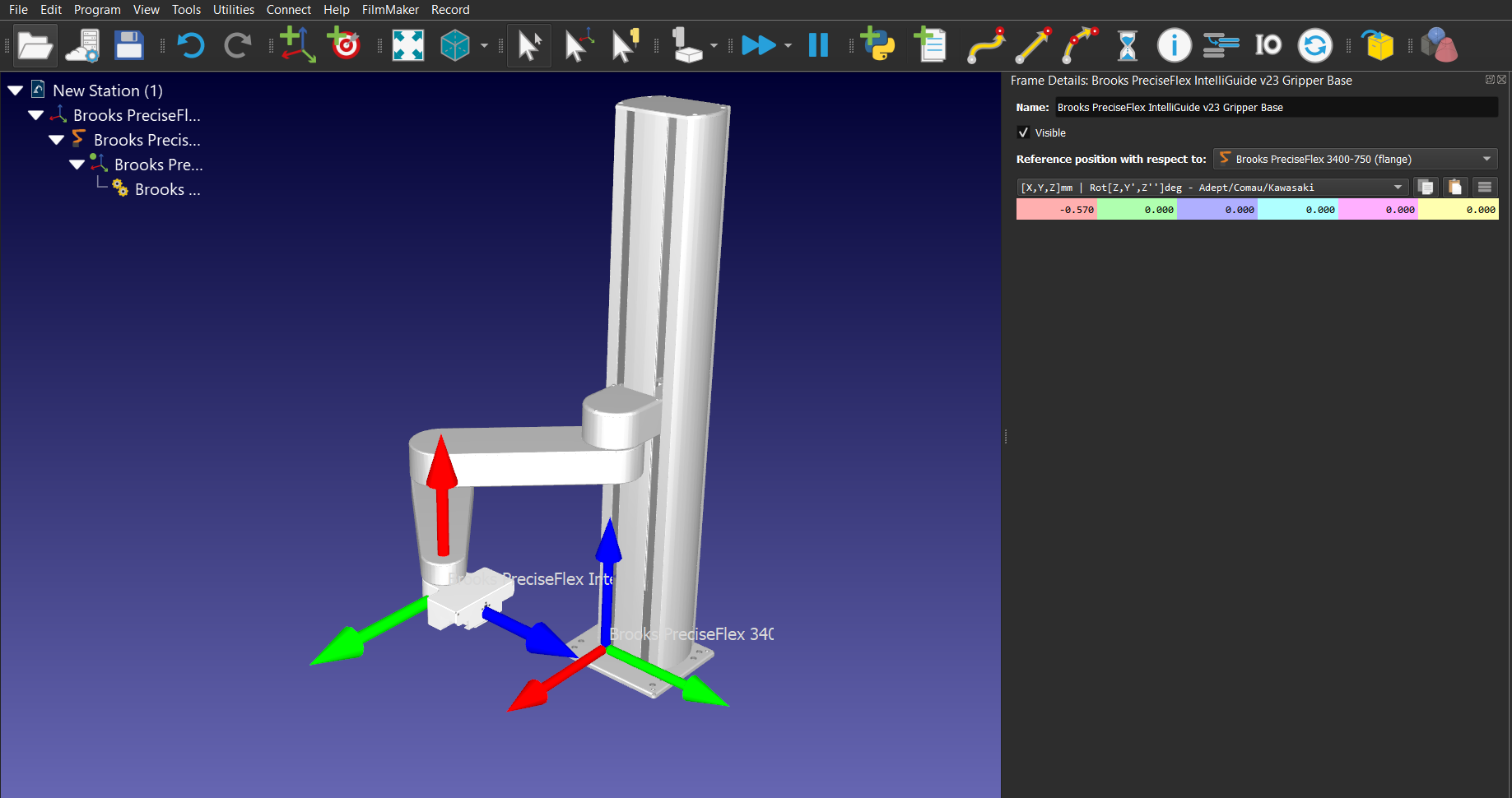
The Base Reference frame of each one of the grippers above is uniquely defined. To properly place the grippers with respect to the Flange Reference Frame of the robots, the following Reference position information must be used:
IntelliGuide s23 | IntelliGuide s60 | IntelliGuide s23D | IntelliGuide v23 | IntelliGuide v60 | |
PreciseFlex 400 | [0.603,0,0,0,0,0] | N/A | N/A | [0,0,0,0,0,0] | N/A |
PreciseFlex 3400 | [0.033,0,0,0,0,0] | [0.033,0,0,0,0,0] | [0.033,0,0,0,0,0] | [-0.57,0,0,0,0,0] | [0,0,0,0,0,0] |
PreciseFlex DD 4-axis | [-70.5,0,0,0,180,180] | [-70.5,0,0,0,180,180] | [-70.5,0,0,0,180,180] | [-71.1,0,0,0,180,180] | [-71.5,0,0,0,180,180] |
PreciseFlex c10 | [-82.5,0,0,0,180,180] | [-82.5,0,0,0,180,180] | [-82.5,0,0,0,180,180] | [-82.5,0,0,0,180,180] | [-82.5,0,0,0,180,180] |
PreciseFlex c3 | [0.313,0,0,0,0,0] | [0.313,0,0,0,0,0] | [0.313,0,0,0,0,0] | [-0.291,0,0,0,0,0] | [0.279,0,0,0,0,0] |
PreciseFlex c3x | [-14.655,0,0,0,0,0] | [-14.655,0,0,0,0,0] | [-14.655,0,0,0,0,0] | [-15.258,0,0,0,0,0] | [-14.688,0,0,0,0,0] |
PreciseFlex c5 | [113,0,0,0,0,0] | [113,0,0,0,0,0] | [113,0,0,0,0,0] | [112.4,0,0,0,0,0] | [113,0,0,0,0,0] |
For what concerns Brooks PreciseFlex DD 4-axis and c10 robots, the IntelliGuide ISO flange available in the Robot Library must be added to the robot for visualization purposes (for the DD 4-axis robot, the IntelliGuide ISO flange geometry must be moved up by 9mm).