Navigation offcanvas
- Basic Guide
- Getting Started
- Interface
- Options Menu
- Robot Programs
- Robot Manufacturing
- Tips and Tricks
- Smaller/Larger References (-/+)
- Rename Object (F2)
- Show/Hide Robot Workspace (*)
- Open your last project or file (Ctrl+1)
- Show the Station Tree as a side window
- Show or Hide Objects (F7)
- Show or Hide the text on the screen (/)
- Move Reference Frames or Objects (Alt)
- Move a Robot Tool (Alt+Shift)
- Reorder Items in the Tree
- Reorder Items in the Tree without moving them
- Change the size of the Station Tree
- Teach a Robot Target (Ctrl+T)
- Modify a Robot Target (F3)
- Teach Robot Targets on a Surface
- Move Robot Targets on a Surface (Alt+Shift)
- Change the Robot Configuration
- Check the status of a Robot Program (F5)
- Faster Simulation (hold Spacebar)
- Generate a Robot Program (F6)
- Export a Simulation (Ctrl+E)
- Send a Program to the Robot (Ctrl+F6)
- Run the Program on the Robot
- Display the Robot Trace (Alt+T)
- General Tips
- Add-ins
- Add-ins
- File Manager
- Palletizing
- Computer Vision
- Display Panel
- OPC-UA
- Realistic Robot Simulation (RRS)
- Components Add-In
- Augmented Reality
- Welding Add-In
- RoboDK CNC
- IO Monitor Plugin
- Blender Export Add-in
- Plugins for CAD/CAM
- RoboDK Add-Ins for CAD/CAM Software
- RoboDK Plugin for BobCAD-CAM
- RoboDK Plugin for FeatureCAM
- RoboDK Add-In for Fusion 360
- RoboDK Plugin for hyperMILL
- RoboDK Add-In for Inventor
- RoboDK Plugin for Mastercam
- RoboDK Plugin for MecSoft
- RoboDK Add-In for Onshape
- RoboDK Add-In for Rhino
- RoboDK Add-In for Siemens Solid Edge
- RoboDK Add-In for SolidWorks
- Collision Detection
- Examples
- Robot Tips
- ABB robots
- Brooks robots
- Comau robots
- Denso robots
- Fanuc robots
- Han’s robots
- Hanwha robots
- JAKA robots
- KEBA Controllers
- KUKA robots
- Mecademic
- Yaskawa Motoman robots
- Omron-TM Robots
- Universal Robots
- Post Processors
- Virtual Reality
- RoboDK API
- Robot Drivers
- Accuracy
- RoboDK TwinTool
- RoboDK TwinTrack
- Robot Calibration (Laser Tracker)
- Robot Calibration (Optical CMM)
- Robot ballbar testing
- ISO9283 Performance Testing
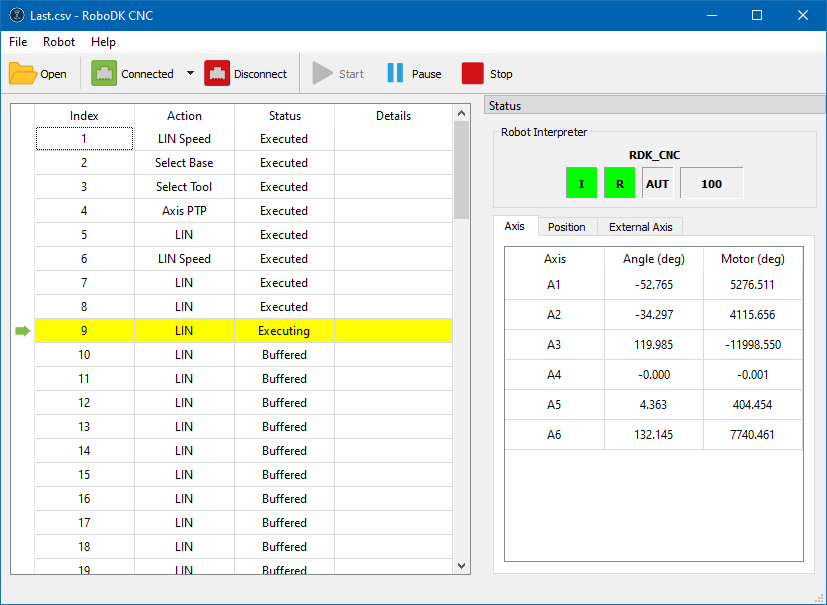
The RoboDK CNC allows feeding large programs to a robot controller.
The main window of RoboDK CNC contains the following elements:
1.Main Menu
2.Toolbar
3.Instruction Table
4.Status Panel
The Main Menu and Toolbar operations overlap.
| Open | Open a CSV file generated using the RoboDK CNC post processor. |
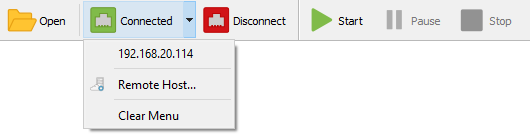
| Connect | This icon indicates that there is currently no connection to the robot control system. Pressing this button will open the connection history menu. |
| Remote Host... | This action will bring up the New Connection dialog box to connect to the IP address and port of the remote robot control system. |
| Connecting | This icon indicates an attempt to connect to the robot control system. |
| Connected | This icon indicates a successful connection to the robot control system. |
| Disconnect | This action immediately interrupts the connection to the robot control system. Be careful, the robot may continue to move even after the RoboDK CNC has been disconnected. |
| Start | Start performing the robot's movements with the very first instruction. Or continue running a previously started program. |
| Pause | Suspend execution of a previously started program. |
| Stop | Cancel program execution and stop the robot's movements. |
The Status Panel contains information about the currently running KRL program, readiness and speed override indicators, and information about the current robot position.
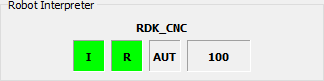
The Robot Interpreter panel contains four indicators:
Robot Drives and Motion |
| The robot's drives are turned on, and the robot is ready to make movements. |
| The robot actuators are switched off and the robot is not ready for operation. | |
KRL Program Status |
| The robot program is not loaded. |
| The robot program is loaded and ready for execution. | |
| The robot program is being executed. | |
| The robot program was interrupted due to an error. | |
| The robot program was fully executed. | |
Robot Controller Mode |
| The current operating mode of the robot control system. It can take the following values: T1, T2, AUT, EXT. |
Speed Override |
| The program execution speed override value in percent from 0 to 100. |