加载
以下步骤概述了在优傲(UniversalRobots)机器人上加载URP文件的步骤。
1.右击程序选择:选择后处理程序
2.选择 Universal Robots URP。
前2个步骤是可选的,因为默认职位也会生成URP文件,不过,它可以让你生成用户可读的URP程序,而不是执行脚本文件的URP程序。
3.右击程序,选择生成机器人程序(F6)
4.将生成的URP文件保存到USB存储盘中。
5.将USB存储盘连接到机器人示教器(UR的Polyscope)
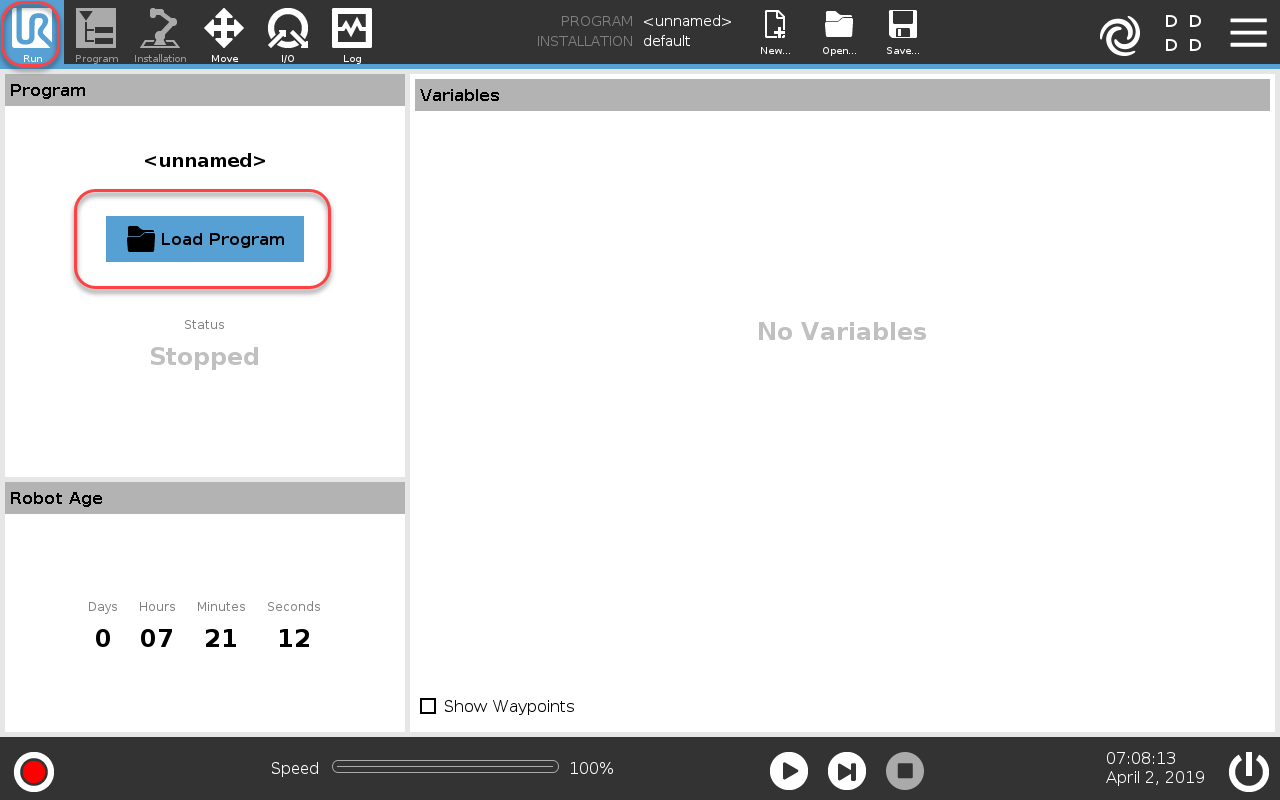
6.在机器人示教器上选择"运行"选项卡
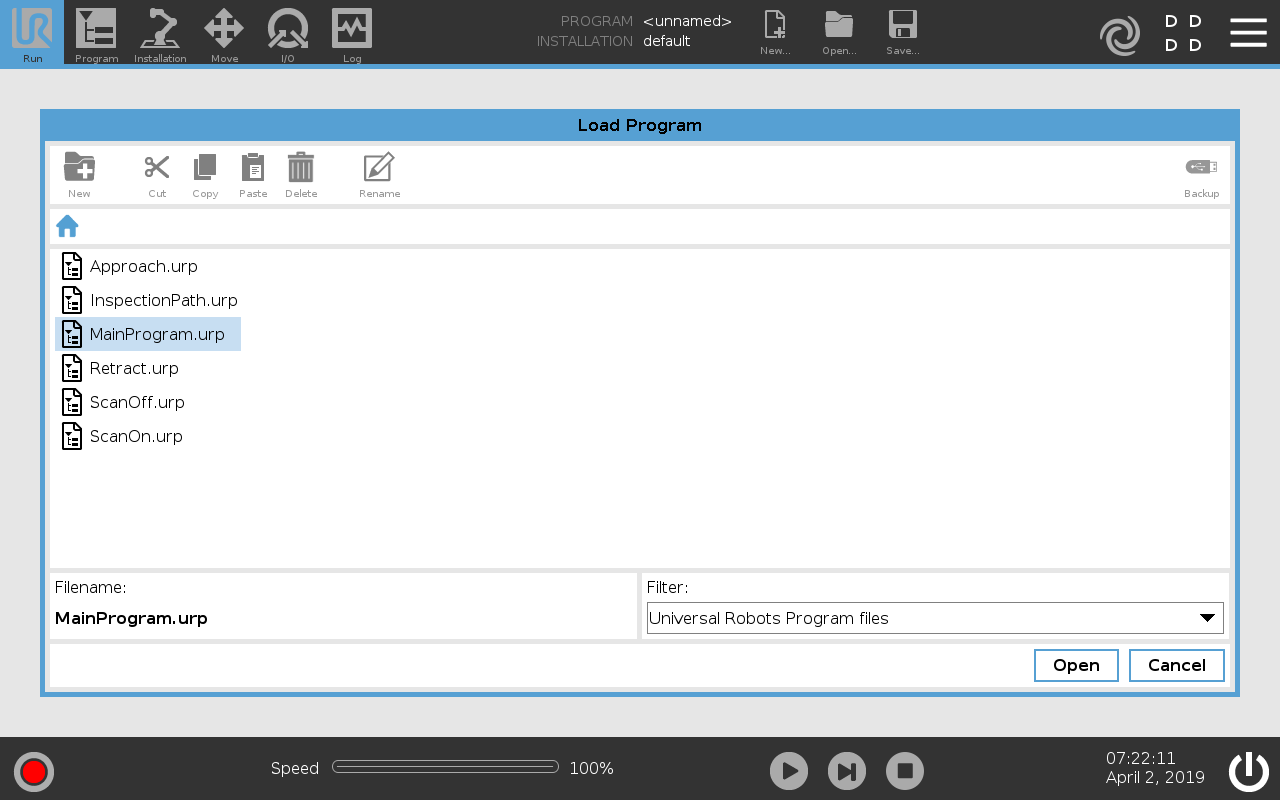
7.选择"加载程序",加载RoboDK生成的程序
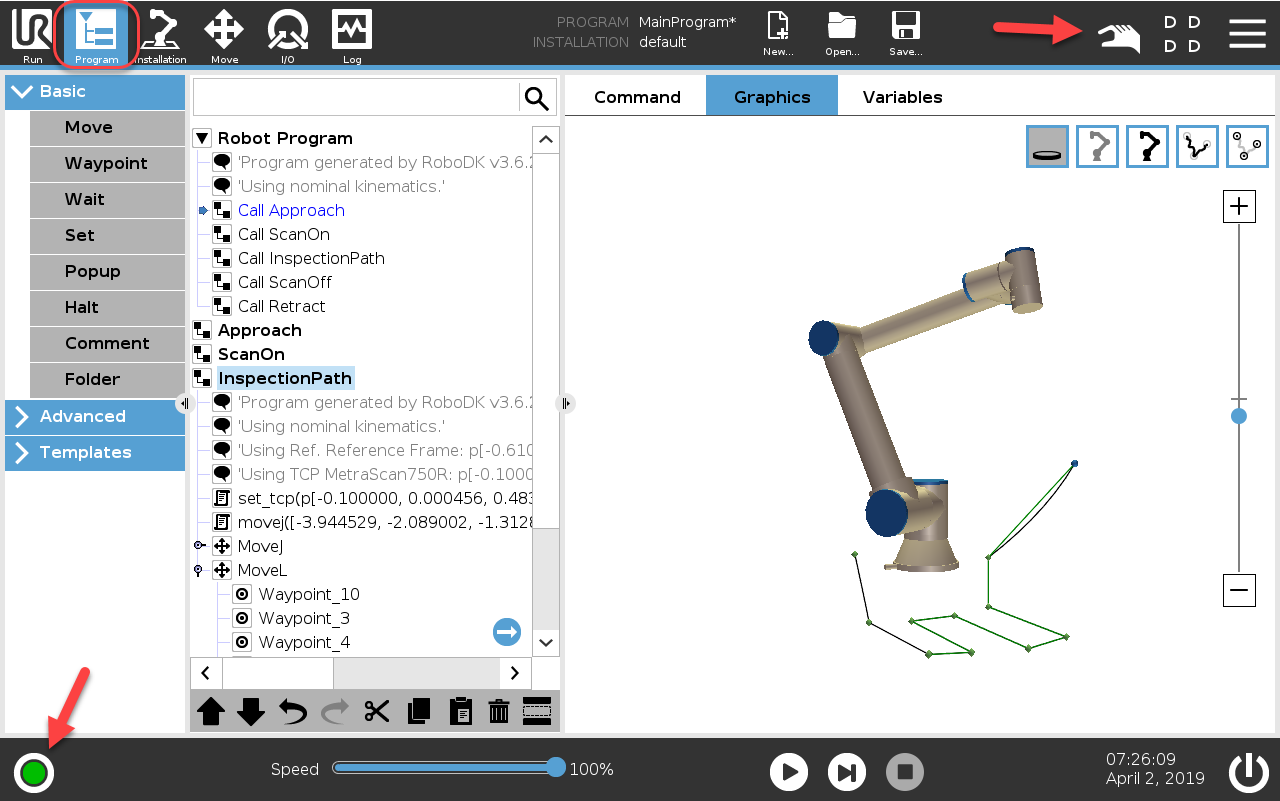
8.选择"程序"选项卡,然后选择"播放"按钮启动程序
Note:你可能需要切换到手动模式(右上角显示手形的按钮必须可见)。
Note:你可能需要激活机器人(左下方的指示灯应为绿色,而非红色)。
9.选择播放按钮启动程序。