RobotiQ
RoboDK支持为优傲机器人生成可操作RobotiQ夹爪的程序。既可通过离线编程生成程序,也可通过RoboDK的UR机器人驱动来操控该夹爪。
通过RoboDK操作RobotiQ夹爪
借助RoboDK离线生成的程序,你可直接从UR控制器端操作RobotiQ夹爪。
启用RobotiQ夹爪支持需按以下步骤选择专用后处理器:
1.右键单击程序或机器人
2.选择:选择后处理程序
3.指定"Universal_Robots_RobotiQ"后处理器
Tip:程序关联的后处理器变更将作用于所有使用同款机器人的程序
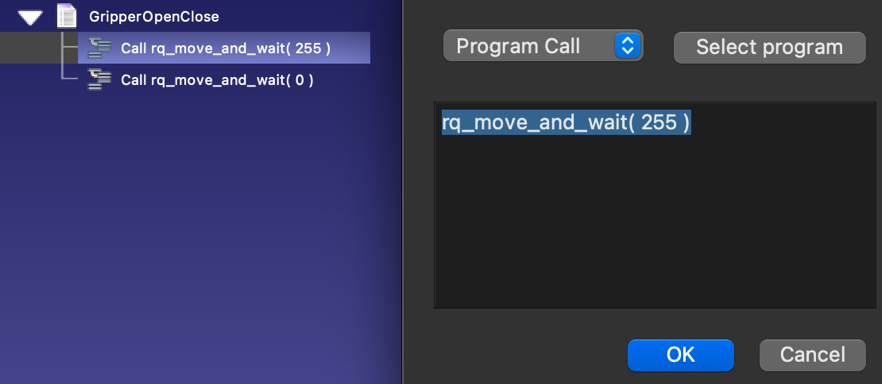
配置完成后,我们可以生成夹爪控制指令,例如:rq_move_and_wait(255)完全打开夹爪,或rq_move_and_wait(0)完全关闭夹爪。
在RoboDK中完成程序准备后,可通过以下两种方式在机器人上运行程序:
- 右键单击程序(如GripperOpenClose),然后选择"发送程序到机器人"。
- 右键单击程序(GripperOpenClose),然后选择生成程序(此方式需手动将程序加载到机器人)。
此操作方式无需使用驱动程序。
Tip:进一步了解如何在程序部分生成程序。
通过驱动程序操作RobotiQ夹爪
你可以使用驱动器(在机器人上运行选项)直接从RoboDK操作RobotiQ夹爪。通过用于UR和RobotiQ的RoboDK驱动程序,你可以从RoboDK中逐步运行程序,并随时从RoboDK中查看正在运行的指针。
确保可连接至机器人(可能需要Windows管理员权限),以允许此通信(如果禁用Windows防火墙,可能有助于排除是否与防火墙有关的问题)。必要时需添加Windows防火墙规则(或临时关闭防火墙排查问题)。
Note:选项"生成程序(F6)"和"发送程序到机器人"仍可正常工作,无需设置驱动器(Windows防火墙、杀毒软件等)。
你应按照以下步骤,为直接从RoboDK移动RobotiQ夹爪添加支持:
1.下载脚本文件:
https://robodk.com/files/upload/progrobodk-rq.zip
Note:对于不支持通过工具进行通信的旧版控制器,应使用此版本:
https://robodk.com/files/upload/progrobodk-rq-no-tool-com.zip。
2.在此处解压缩progrobodk.script文件:
C:/RoboDK/bin/progrobodk.script
3.确保重新启动正在运行的驱动器(双击断开连接,然后,连接)。
4.菜单栏选中:工具➔选项➔驱动选项卡。
5.取消选中该选项:当连接到机器人时,在RoboDK中显示机器人反馈(仅兼容机器人)。
Tip:UR日志可以帮助我们了解机器人方面是否有任何故障。
要使用驱动器正确操作夹爪(例如,打开/关闭夹爪),应通过传递0-255范围内的参数,使用程序调用rq_move_and_wait。
例如
rq_move_and_wait( 0 ) # Fully close the gripper
rq_move_and_wait( 255 ) # Fully open the gripper
作为参数传递的数字是驱动器所需要的。