校准工具坐标系
选择实用程序➔校准工具可通过RoboDK进行TCP校准。你可以使用任意数量的接触点,并采用不同姿态。接触点越多且姿态变化越大,TCP的估算结果就越精确,同时也能获得更好的误差评估。
Note:更多信息请参见校准TCP章节。
TCP校准提供以下两种方式:
o以不同姿态使TCP接触同一固定点。
o使TCP接触平面(类似测头)。
如果要校准测头或主轴,建议采用平面参考物接触法。这种方法能有效降低人为操作误差。
若TCP为球形,系统将自动计算球心作为新TCP坐标(无需提供球体直径)。
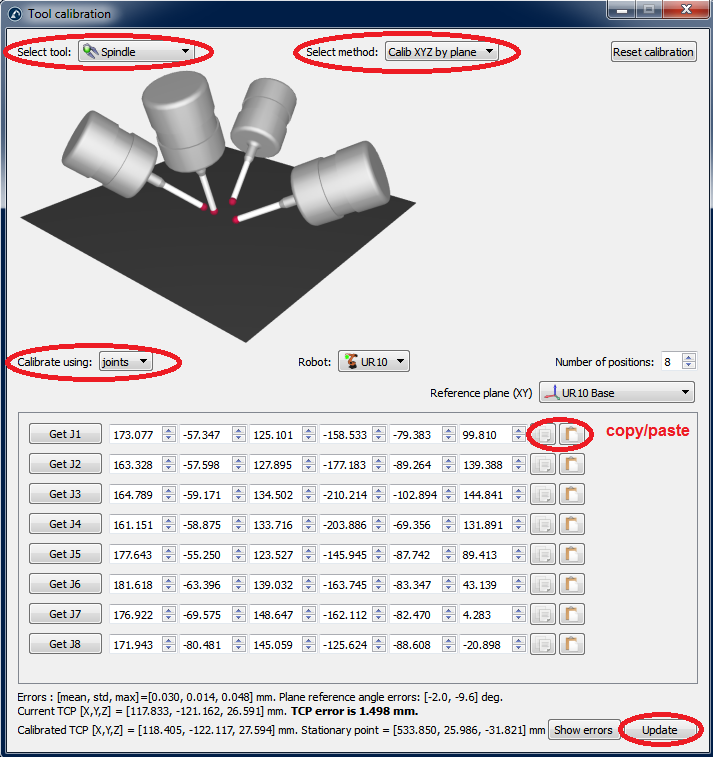
采用平面校准法时(如图所示),请按以下步骤操作:
1.选择需要校准的工具。
2.选择校准方法➔通过平面校准XYZ。
3.使用"关节"选择校准。
4.选择正在使用的机器人。
5.设定TCP校准使用的姿态数量(建议不少于8组)。
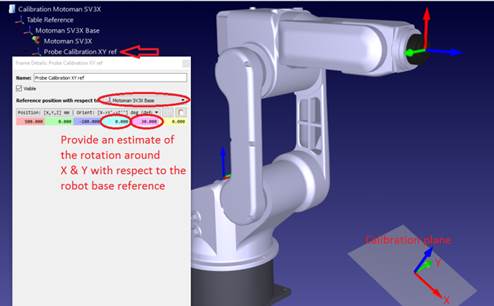
6.估算参考平面方位。若参考平面与机器人XY基准面不平行,需在±20°范围内输入平面方位估值(只需关注平面朝向,位置无关紧要)。
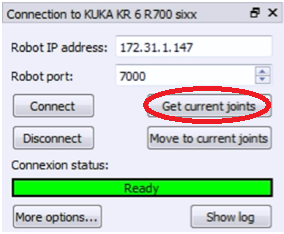
7.现在可以开始填写关节值表格。你可以手动输入数据,或通过界面按钮进行复制/粘贴(如图所示)。也可在工具定义窗口点击按钮:获取Px,这样就能从模拟器中读取当前机器人关节值。若要从实际连接的机器人获取关节值,需先在连接机器人窗口点击按钮:获取位置(具体连接方法详见附图或附录说明)。强烈建议单独保存用于校准的关节值副本(例如存为文本文件)。
8.当表格填写完成后,窗口底部将显示"已校准TCP"的新坐标值(X,Y,Z)。然后点击"更新"按钮,RoboDK工作站中的TCP数据将同步更新。注意:此方法无法确定测头的方向参数。
9.点击"显示误差"可查看每个姿态相对于计算TCP(所有姿态的平均值)的偏差值。若某组姿态误差明显偏大,可单独删除该组数据。
10.必须手动将新TCP坐标(X,Y,Z)更新至真实机器人控制器中。但若该TCP将用于RoboDK生成的程序,则无需在机器人控制器中更新这些数值。