搭建离线环境
在开始实际测量前,建议先在RoboDK中创建机器人工作站的虚拟环境(离线搭建)。本节介绍如何离线准备RoboDK工作站——仅需一台安装RoboDK的电脑即可完成,无需提前准备真实机器人和跟踪仪。
RoboDK校准项目示例可从示例库中下载。
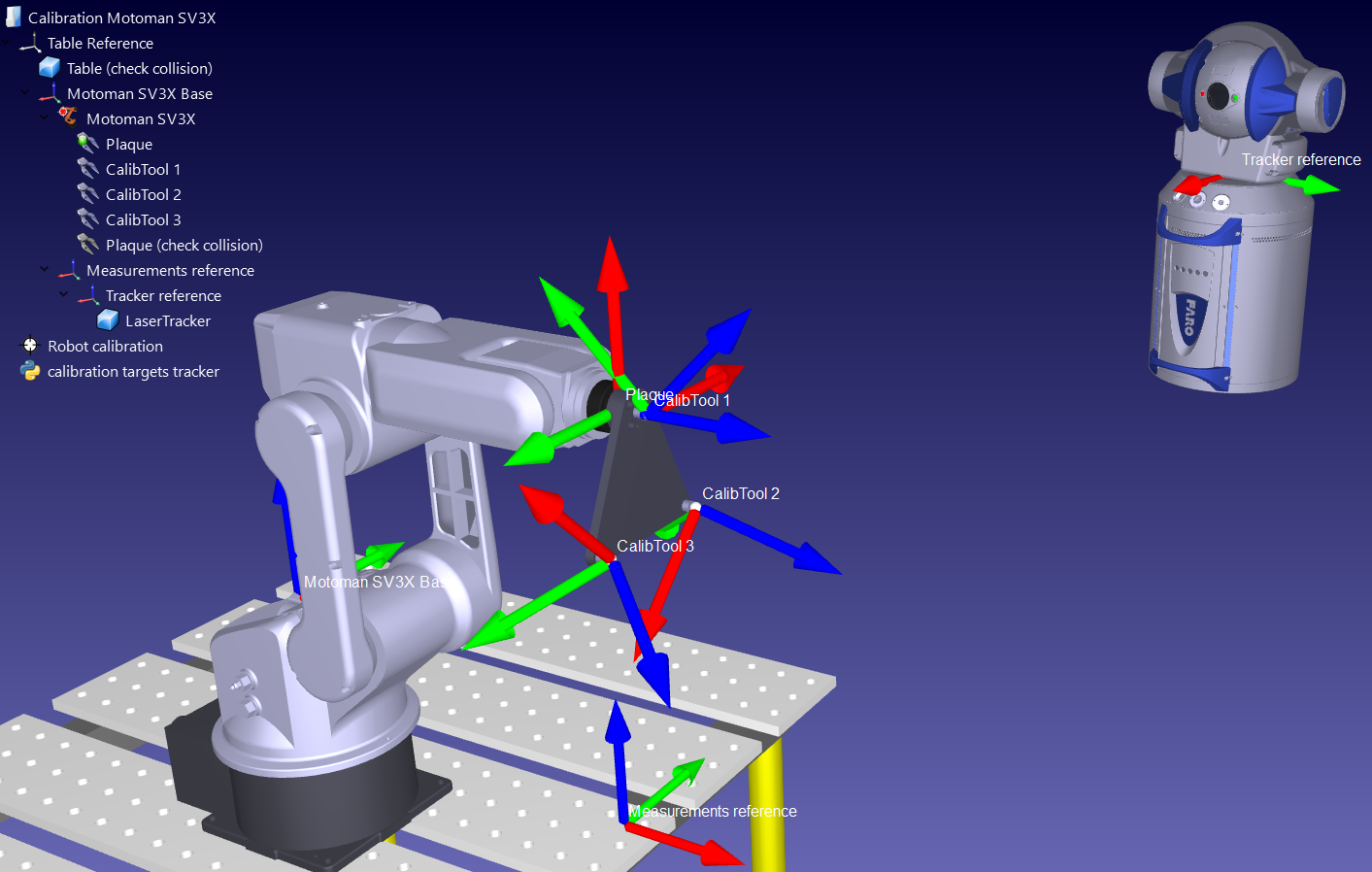
若已有离线工作站,可跳过本节。可先粗略估算参考坐标系和工具坐标系,下图展示了一个示例的工作站:
Note:入门指南会指导如何创建工作站。
搭建工作站
RoboDK工作站是存储虚拟环境及校准信息的载体,保存为.rdk文件。以下为从头创建机器人校准工作站的步骤(视频演示:https://youtu.be/Nkb9uDamFb4):
1.导入机器人模型:
a.在菜单栏点击:文件➔打开机器人库。浏览器中会新打开一个在线模型库。
b.通过品牌、负载等筛选条件找到目标机器人...
c.点击Open,机器人就会出现在现有的工作站中。
d.或从http://robodk.com/library下载机器人文件(.robot文件),然后双击文件,会自动在RoboDK中打开。

2.准备校准项目:
a.点击:程序➔添加参考坐标系,依次创建:
i.测量基准系(Measurementsreference):相对于机器人基坐标系。
ii.跟踪仪基准系(Trackerreference):相对于上一步的测量基准系。
iii.工具基准系(Toolreference,可选):用于可视化跟踪仪视角下的工具位置。
Tip1:在树形结构中拖拽调整依赖关系(如跟踪仪基准系需依附于测量基准系)
Tip2:按住Alt(平移)或Shift+Alt(旋转)粗略移动坐标系,或双击输入精确坐标。
Tip3:在树中选中任何物体,按F2键为其重新命名。
a.导入工具CAD文件(支持STL、IGES、STEP格式),拖拽至机器人下方,这样会自动转换为工具。更多信息点击这里。


可选:选择程序➔添加工具(TCP),创建TCP,用于碰撞检测:
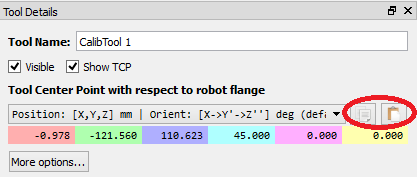
iv.双击工具。
v.设置初始TCP值(可批量粘贴6轴参数)。
vi.校准工具建议命名为CalibToolid(id为靶球编号,如CalibTool1)。
b.通过文件➔打开…或拖拽添加环境模型(如工作台、跟踪仪视野模型)。
Tip1:导入测量工作区的三维文件并将其命名为工作区,以便在追踪仪工作区内生成机器人测量结果。如果不想将测量限制在追踪仪工作区内,也可以将工作区设置为不可见。更多信息详见下一节。
Tip2:按Ctrl+Alt+Shift+P,锁定敏感模型防止导出。
3.添加校准程序:
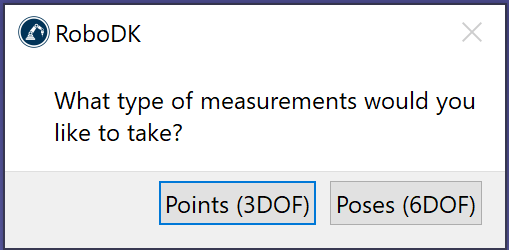
a.选择菜单:实用程序➔校准机器人。
b.选择按钮:点(3DOF)
c.如果你的激光跟踪仪(如徕卡T-Mac激光跟踪仪)支持位姿测量且与RoboDK兼容,你可以选择性地启用位姿(6DOF)功能。
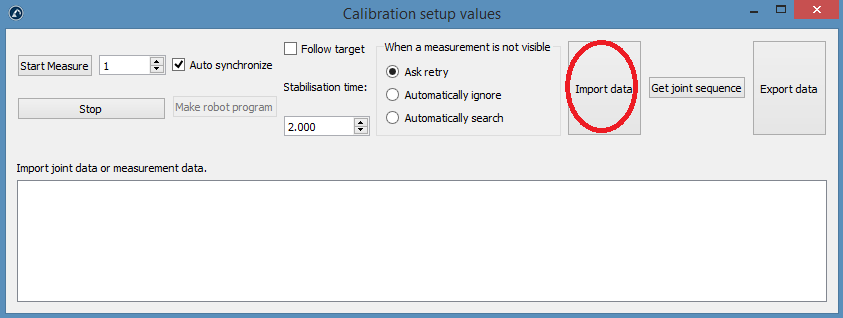
然后出现以下窗口。
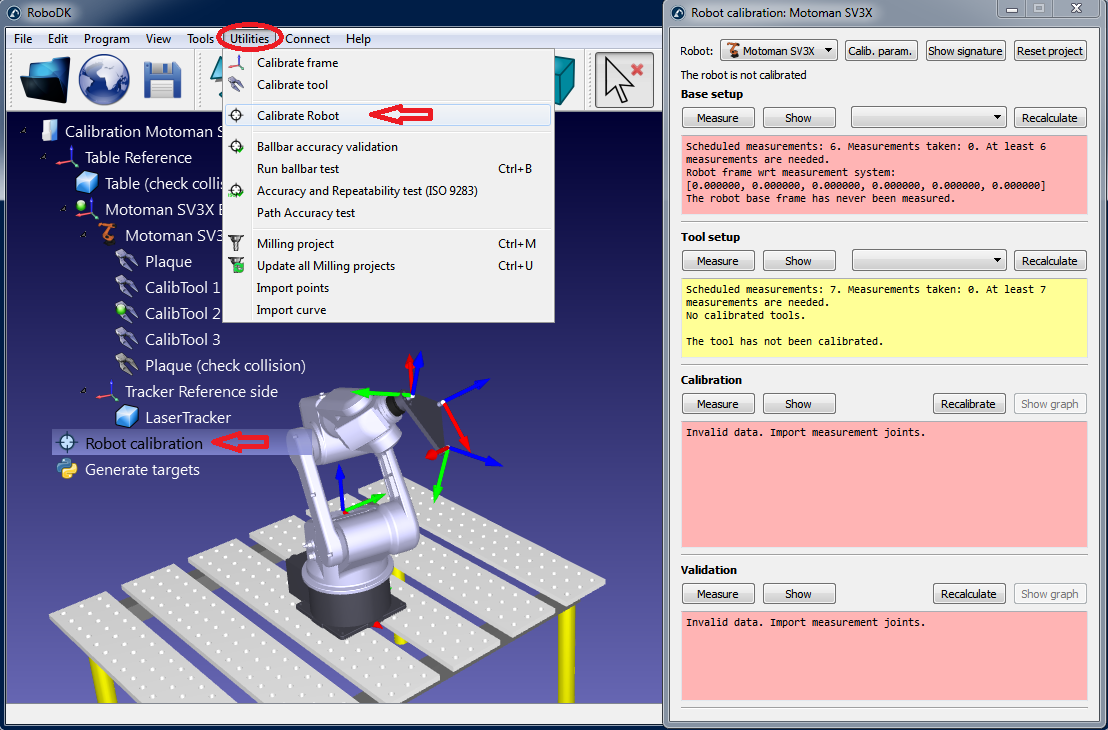
目前可以关闭此窗口。你只需双击工作站的机器人校准,即可随时重新打开。
Tip:若仅需校准机器人的原点位置(也称为Mastering或Home),请在校准设置窗口中选择:校准参数,然后选择零点复归。否则,请保持默认校准类型:完整,该类型可进一步提高精度。

4.保存工作站
a.选择文件➔保存工作站。
b.选择文件夹,并选择文件名。
c.选择保存。将生成一个新的RDK文件(RoboDK工作站文件)。
后面可以随时打开RDK文件(双击文件)修改该工作站内容。
总之,必须仔细检查以下几点:
1.校准工具(SMR标靶)应命名为“CalibTool1”。强烈建议初始校准时仅使用1个工具/标靶。若需使用更多校准标靶,请按相应顺序递增编号。例如,若有3个校准工具/SMR标靶,则应分别命名为:CalibTool1、CalibTool2和CalibTool3。
2.测量参考系直接依赖于机器人基座。
Important:若要恢复1轴的初始位置,测量参考系必须与机器人保持相似的朝向。你必须能够通过3个点以高度可重复的方式测量该参考系。更多信息请参阅附录I。
目前,你可以使用这个参考坐标系的估计值。
3.跟踪器参考系必须直接连接到测量参考系,且其位置应为激光跟踪器相对于测量参考系的近似值。基座设置将自动修正跟踪器位置。
4.工作站中已加载机器人校准项目,所有待测点需确保无碰撞且能被激光跟踪器可见(对每组测量点启用"显示"功能)
5.如需自动碰撞检测,所有待检物体需标注"collision"标签。建议使用比校准工具尺寸大25%的虚拟工具进行检测以确保安全。
生成校准目标
要成功完成机器人校准,需要进行四组测量:
1.基本设置:需要进行六次(或更多次)移动轴1和轴2的测量,以便相对于机器人放置校准基准。在校准设置窗口中选择"显示",机器人将沿序列移动。
2.工具设置:需要进行七次或更多次测量,以校准工具法兰和工具目标(移动轴5和6)。选择"显示",机器人将按顺序移动。
3.校准测量:校准机器人需要60次或更多的测量。这些测量可随机放置在机器人工作区内,且不会与周围物体发生碰撞。
4.验证测量(可选):可根据需要使用任意数量的测量来验证机器人的精度。这些测量值仅用于验证机器人的精度,而不是校准机器人。
前两组测量由RoboDK自动生成。选择"显示",机器人将按照顺序进行测量(如下图所示)。如果需要更改顺序,请选择"测量",然后通过选择"导出数据"将校准测量结果导出为CSV文件。可使用Excel表编辑该文件,然后单击"导入数据"重新导入。
Important:CSV文件的第一行必须保持不变。
最后两组测量(校准和验证)可使用名为
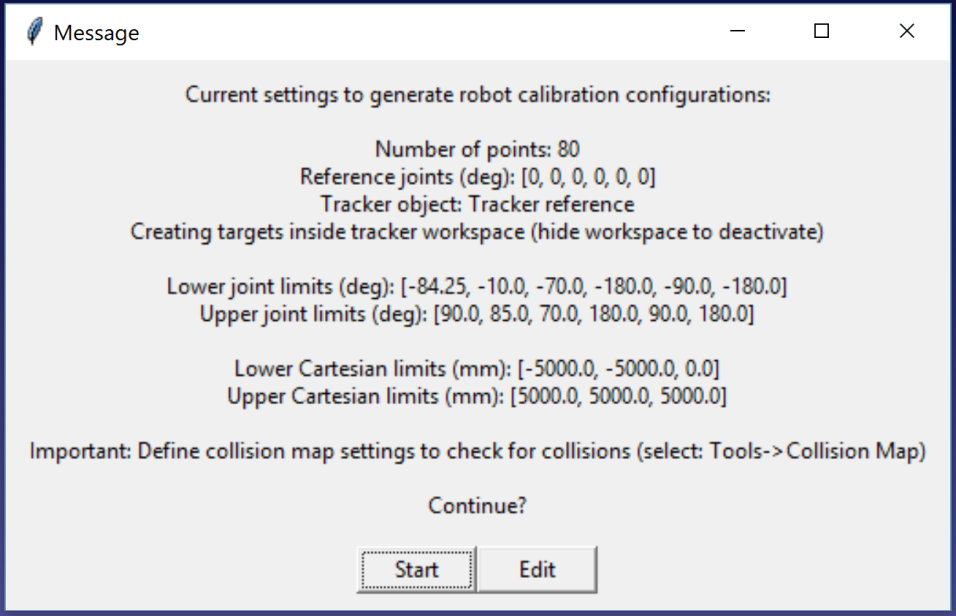
●测量点数:默认生成80个测量点,因校准至少需要60个数据点。
●参考位置:必须选择工具正对跟踪仪且靶标可见的机器人位姿。
●关节限位:需提供各关节运动的下限和上限。
●笛卡尔限位:可设置相对于机器人基坐标系的X/Y/Z轴向运动范围。
脚本将自动生成满足以下条件的测量路径:工具始终朝向跟踪仪,且符合关节/笛卡尔空间约束。在参考位置方向上允许工具绕轴±180°旋转。所有关节运动均确保无碰撞且位于测量工作空间内(若工作空间可见)。下图显示自动序列开始前呈现给用户的参数摘要,整个过程可能耗时5分钟。
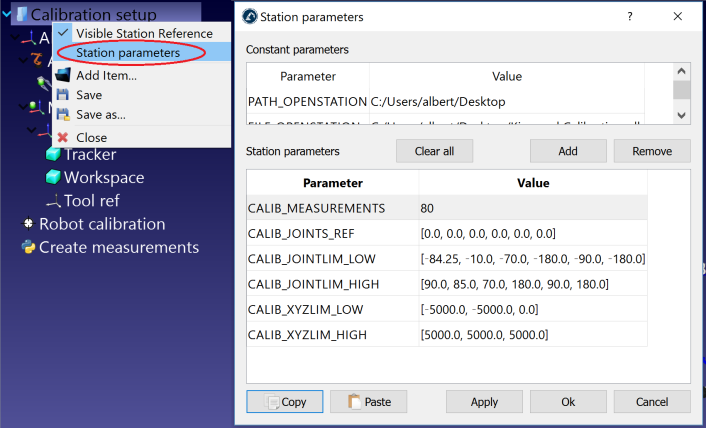
如果需要,可以右击Create measurement脚本并选择编辑Python脚本,然后修改算法的其他参数。脚本会自动将用户输入的内容保存为测站参数。你可以通过右键单击测站并选择测站参数来查看、编辑或删除这些设置,如下图所示。
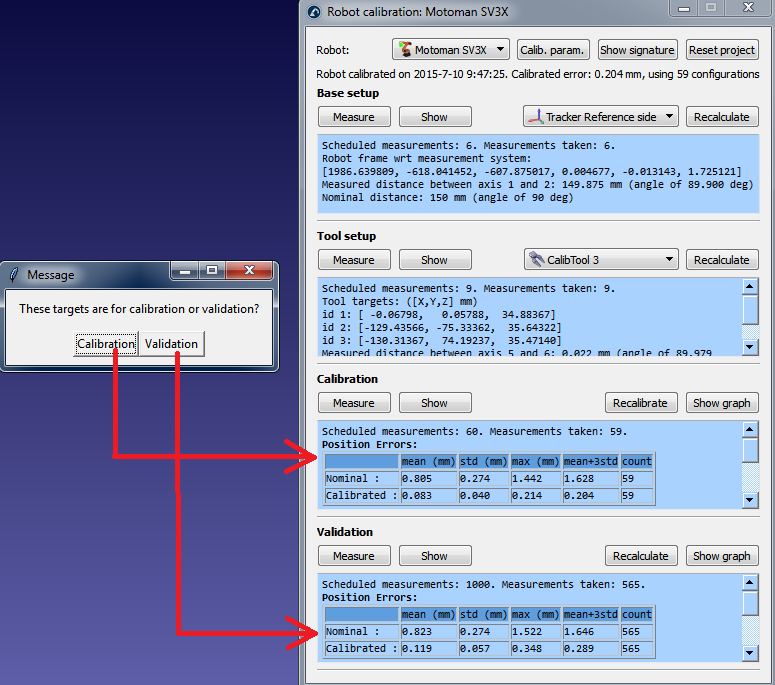
算法精加工完成后,会弹出一条新消息。你可以选择"校准",将60次测量结果用于机器人校准。你可以重新执行相同的脚本,生成另一组测量值用于验证。这一步是可选的,但建议使用80个测量值进行验证。
最后,还可以通过选择导入数据(在测量窗口)来导入手动选择的配置。你可以将CSV或TXT文件导入一个Nx6值数组,其中N是配置的数量。