零点复位轴
若需使轴1与实际机器人基坐标系对齐,必须在开始校准前精确测量三个基准靶球。这些靶球应按照能建立机器人相对参考系的原则布置。
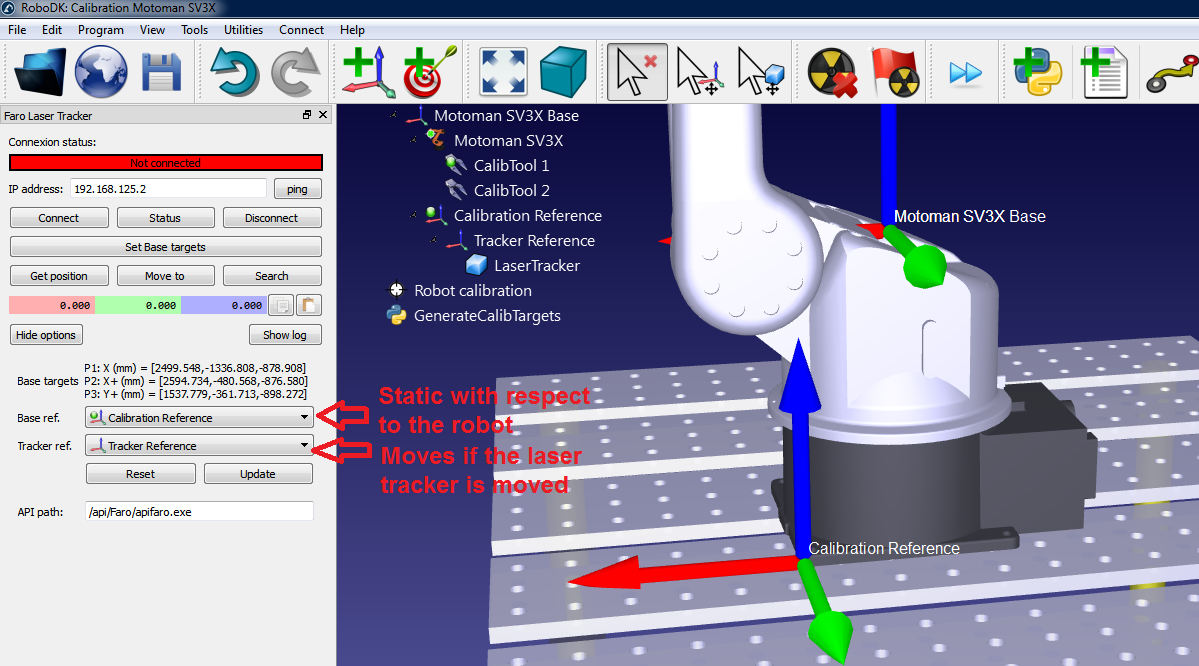
轴1"原点"位置取决于上述三个基准靶球及机器人基座设置。基座设置是校准第一步,通过移动并测量第1、2轴,将测量系统基坐标系与机器人基坐标系对齐。
点击"设置基准靶球"可配置测量系统基准点(见下图)。这三个测量点将定义目标机器人参考系(前两点确定X轴,第三点确定Y轴正向)。应选用与机器人基座相关的可重复参考点。
第1关节的修正角度,即通过三点测量获得的基坐标系X轴与通过机器人第1、2轴运动测量的基坐标系X轴之间的夹角(两者均投影至三点建立的基坐标系XY平面)。