参考坐标系
双击一个参考坐标系
Note:你也可以在机器人面板修改参考坐标系。
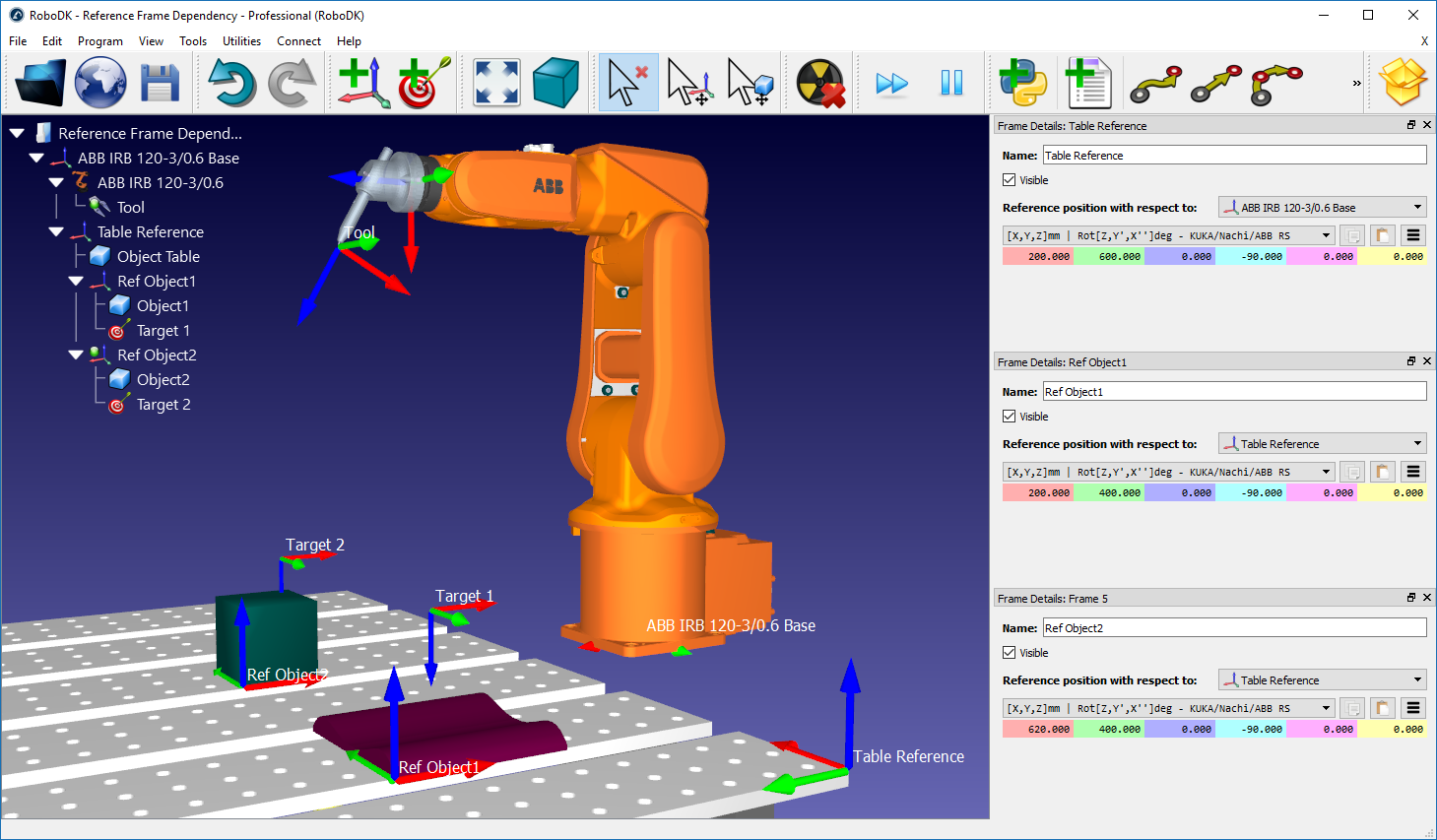
用户可以定义多个参考坐标系之间的关系。例如,一个工作台的位置可以相对于机器人基底位置来定义,在工作台上的物体可以相对于工作台位置定义。移动工作台的坐标不会更改物体与工作台之间的位置关系,但是会修改物体与机器人的位置关系。以上内容如图所示。
Tip: 我们建议使用参考坐标系来移动物体。通过参考坐标系可以很容易地在工作站内移动物体,并使用该坐校准义机器人目标。

Vedio:更多有关参考坐标系,以及参考坐标系对于仿真和离线程序设计的重要性详见该视频:https://www.youtube.com/watch?v=GGc_bXPs2dk。