如何建模
通过"建模结构或机器人",你可以建模一个平行夹爪。平行夹爪也称为双指夹爪,可以让机器人抓取部件。
Video:如何制作双指夹爪:https://www.youtube.com/watch?v=kK4PRTjOZ48
按照以下步骤导入3D模型:
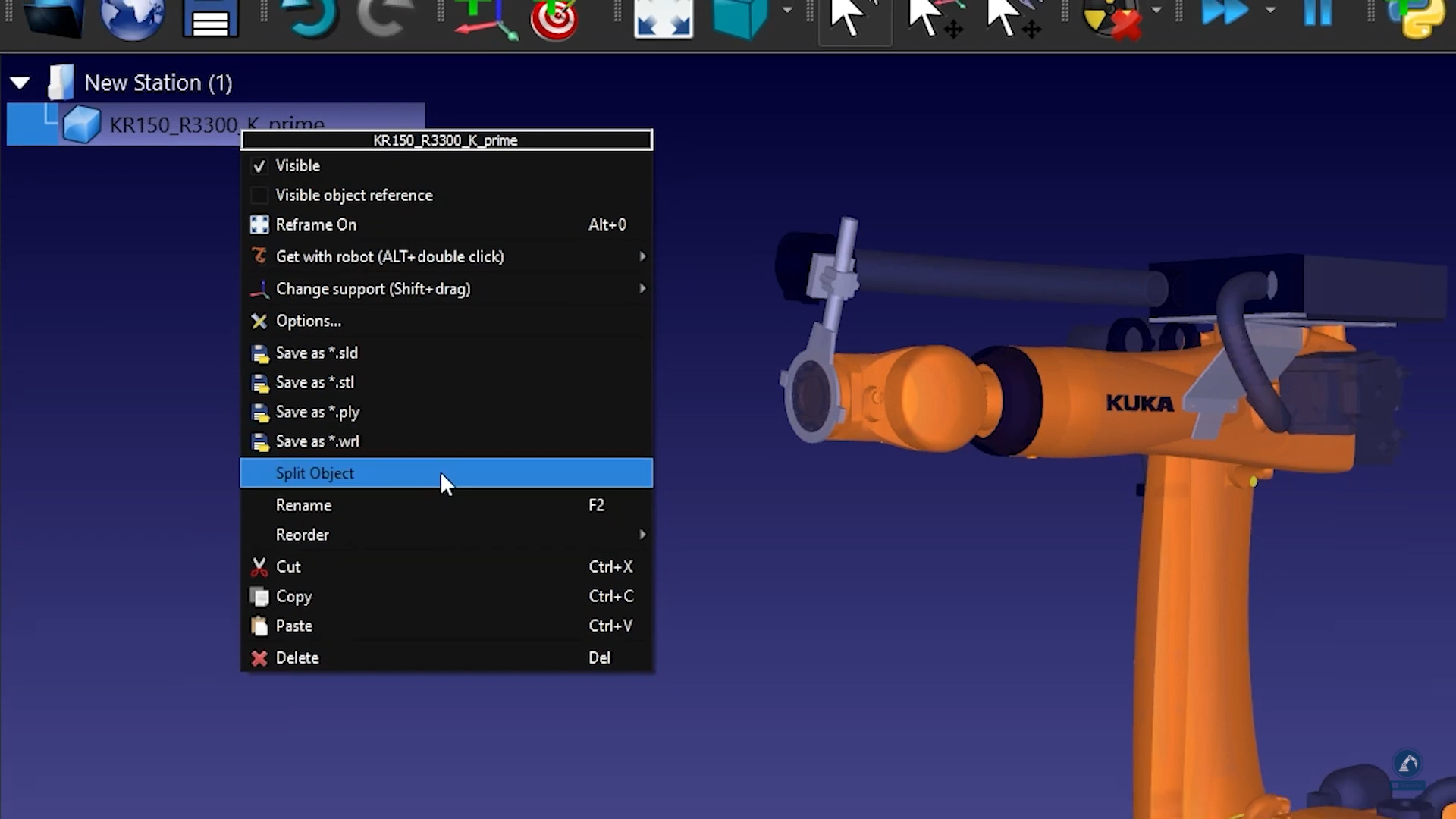
1.导入 3D 模型:拖放 STEP 文件将其载入工作站(IGES 或 STL 文件也可以)。
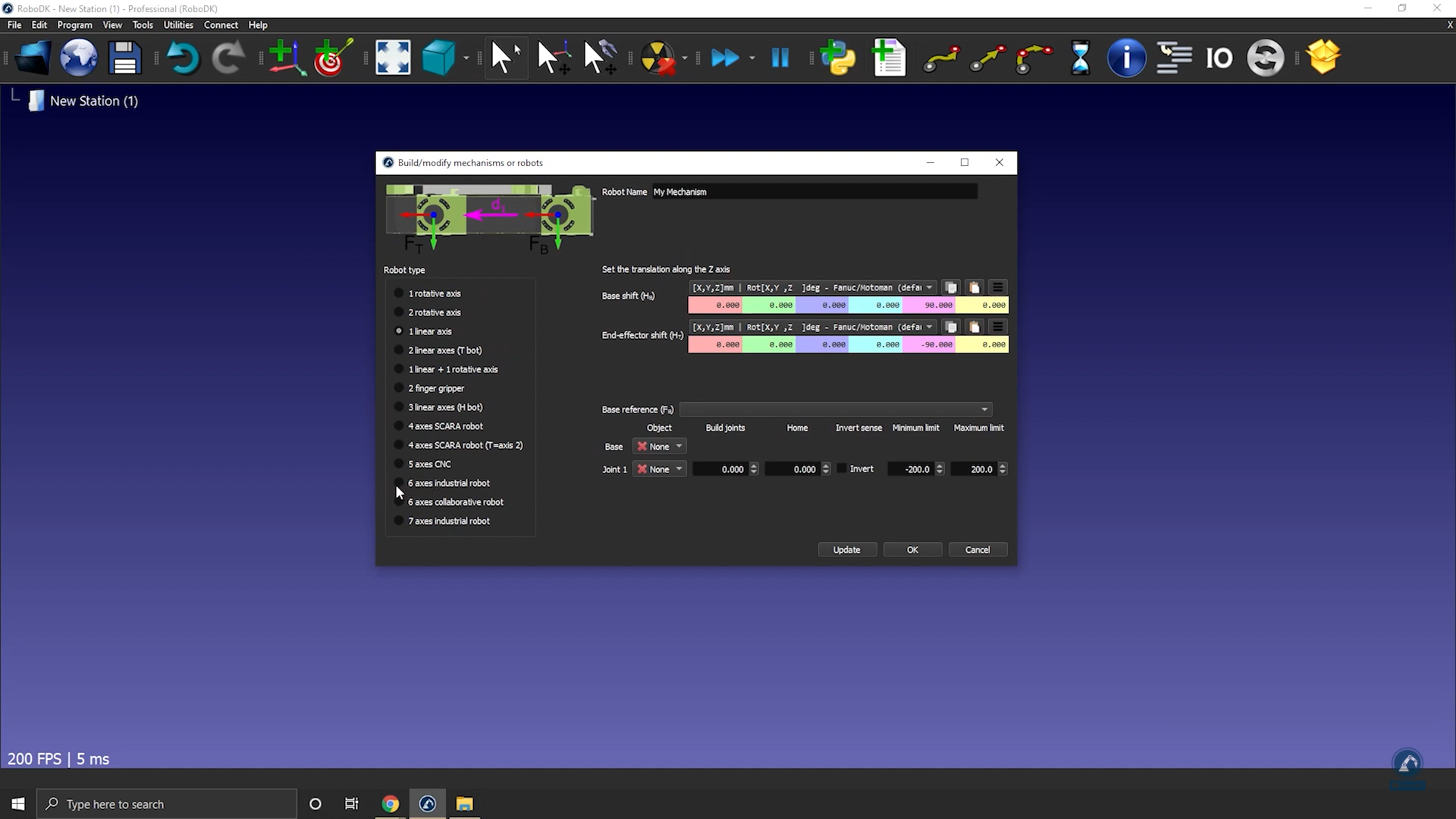
2.打开机械结构生成器:实用程序➔建模结构或机器人。
3.下拉选项中选择:2个抓手。
4.你可以给机器人命名为:2 finger gripper。
按照以下步骤调整坐标系:
5.创建参考坐标系,这里应位于夹爪下方,命名为:Frame Base。
6.确保刚才创建的坐标系根据图像定位:将参考坐标系调至 0.000 mm (X,Y,Z)。
Note:将夹爪手指置于原点(0 毫米)可以简化操作。如果希望零点位置是夹爪闭合的位置,则将手指向中间移动,直到手指相触。
7.在机械结构生成器窗口中输入夹爪的运动范围:如果将手指置于 0 位置,则最小限值为 0,最大限值为 80。
8.选择更新,此时会出现一个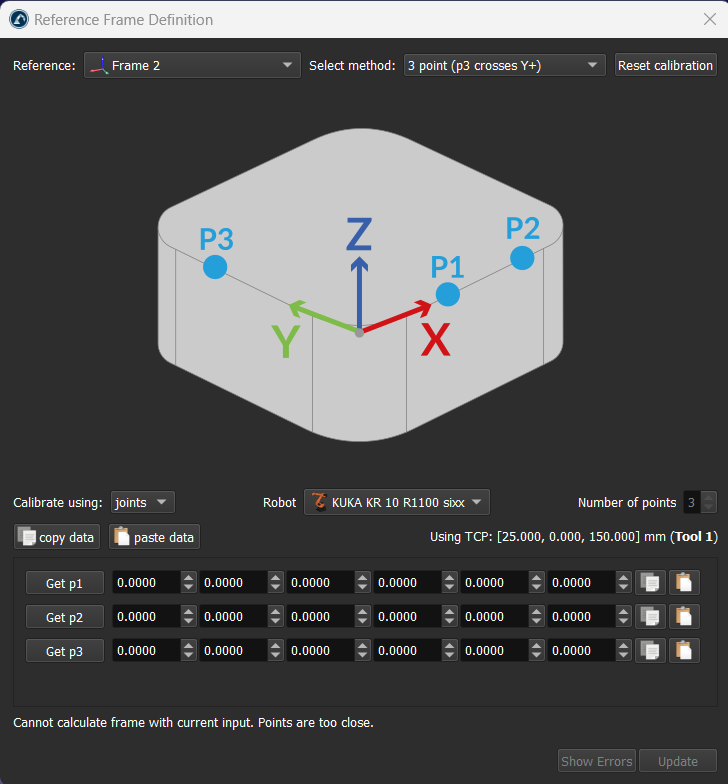
9.双击
10.如果确认没问题,就可以在机械结构生成器窗口选择确定。