创建一个新的
这些步骤将向你展示如何在 RoboDK 中为拾取和放置应用创建一个新项目(也称为工作站)。
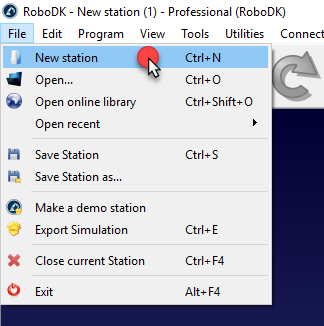
1.打开 RoboDK:在计算机上启动 RoboDK 应用程序。
2.创建新工作站从RoboDK 的主菜单中选择:文件-新建工作站-新的空白工作站将被创建为你的工作区。
3.从资源库中插件机器人
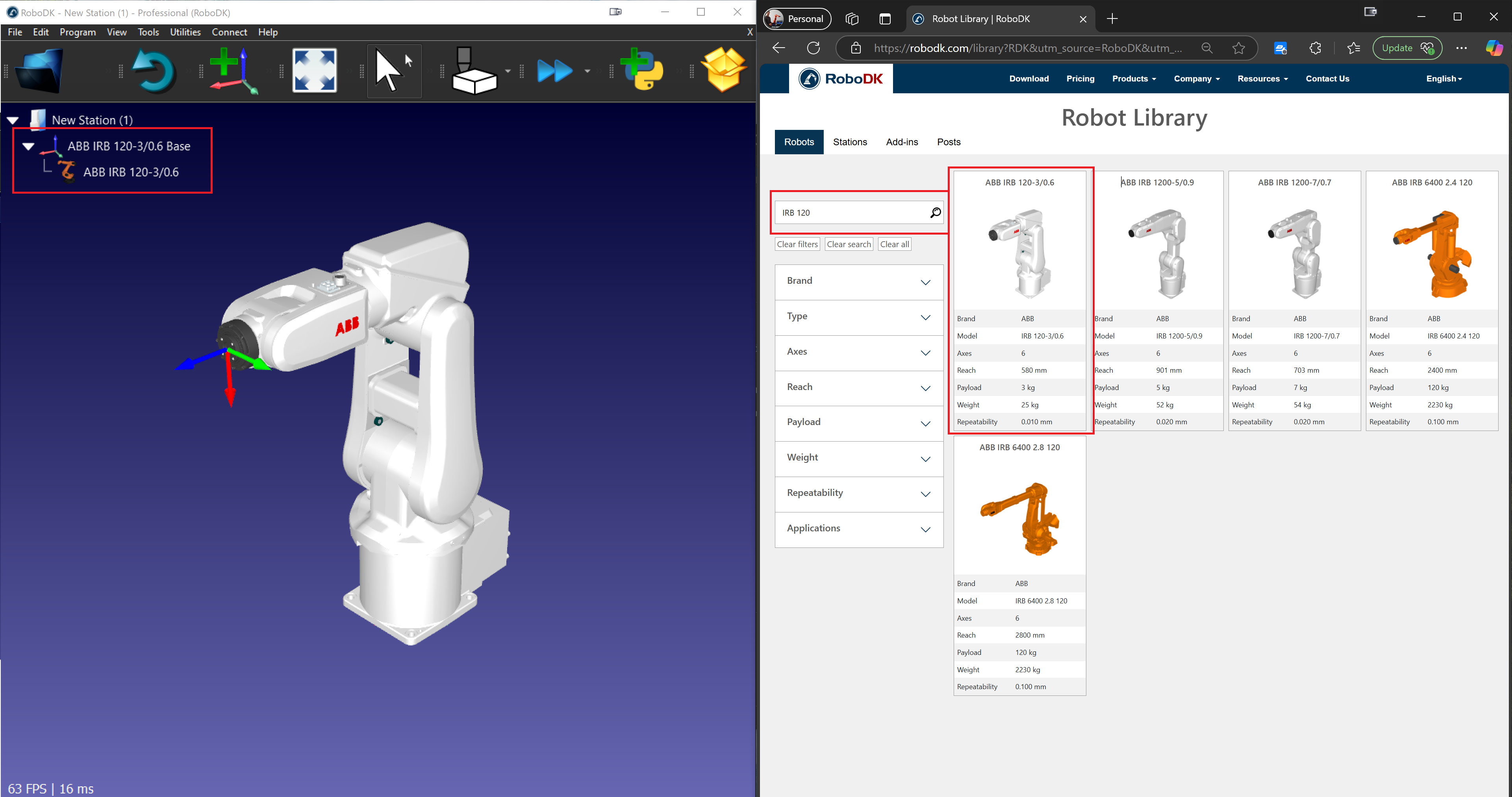
a.打开RoboDK在线资源库下载机器人
i.在主菜单中选择文件 → 打开机器人库。
ii.将弹出一个RoboDK 资源库的网页,显示各种工业机器人。
b.选择并导入机器人:
i.使用搜索栏查找适合拾放任务的机器人(如 UR10、ABB IRB 120、Fanuc LR Mate)。
ii.点击所需的机器人,然后选择:Open。
c.将机器人放置在站内:
i.机器人将自动出现在站内。
ii.如有必要,可使用 "移动工具 "调整其位置。
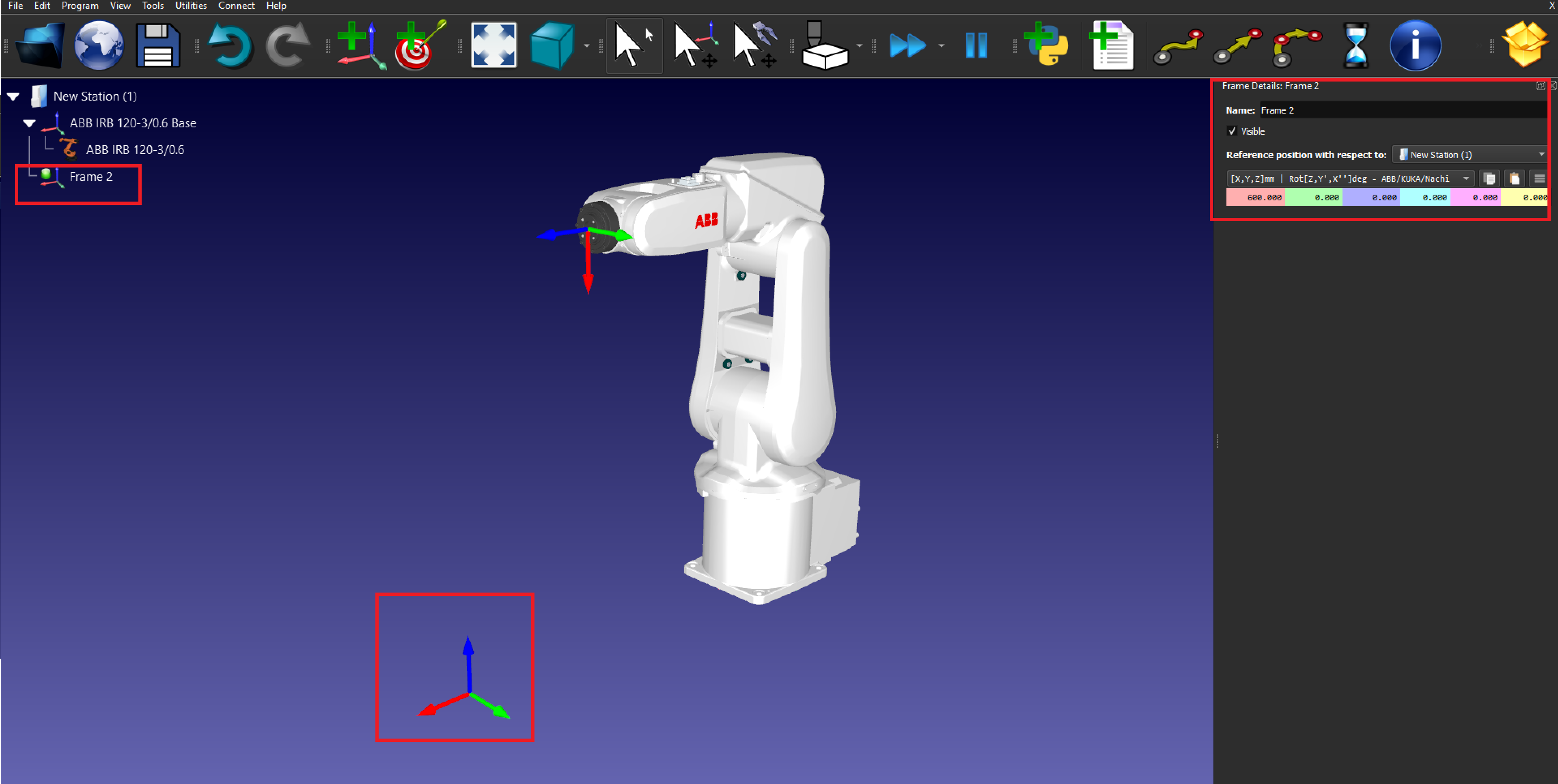
4.添加参考坐标系插件
a.创建参考坐标系:
i.选择程序 → 添加参考坐标系。
ii.新的参考坐标系将出现在工作站的数和 3D 视图中。
b.定位参考坐标系:
i.双击参考坐标系,输入坐标(X、Y、Z)和旋转值。
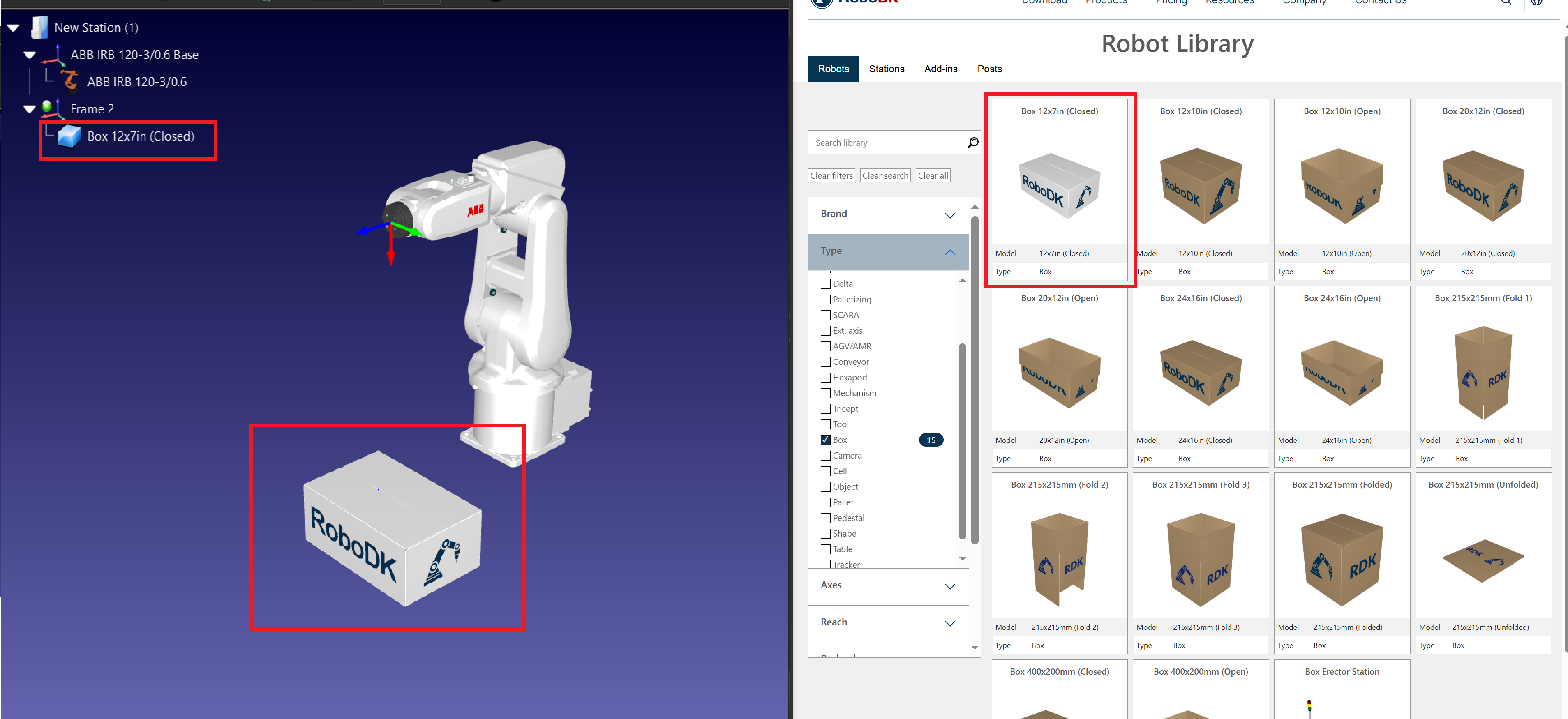
5.导入 3D 物体
a.导入物体模型:
ii.在主菜单中选择文件 → 打开。
iii.选择要拾取和放置的物体 3D 模型(如 STEP、IGES 文件)。
b.定位物体:
iv.使用 "移动工具 "调整物体在参考坐标系中的位置。
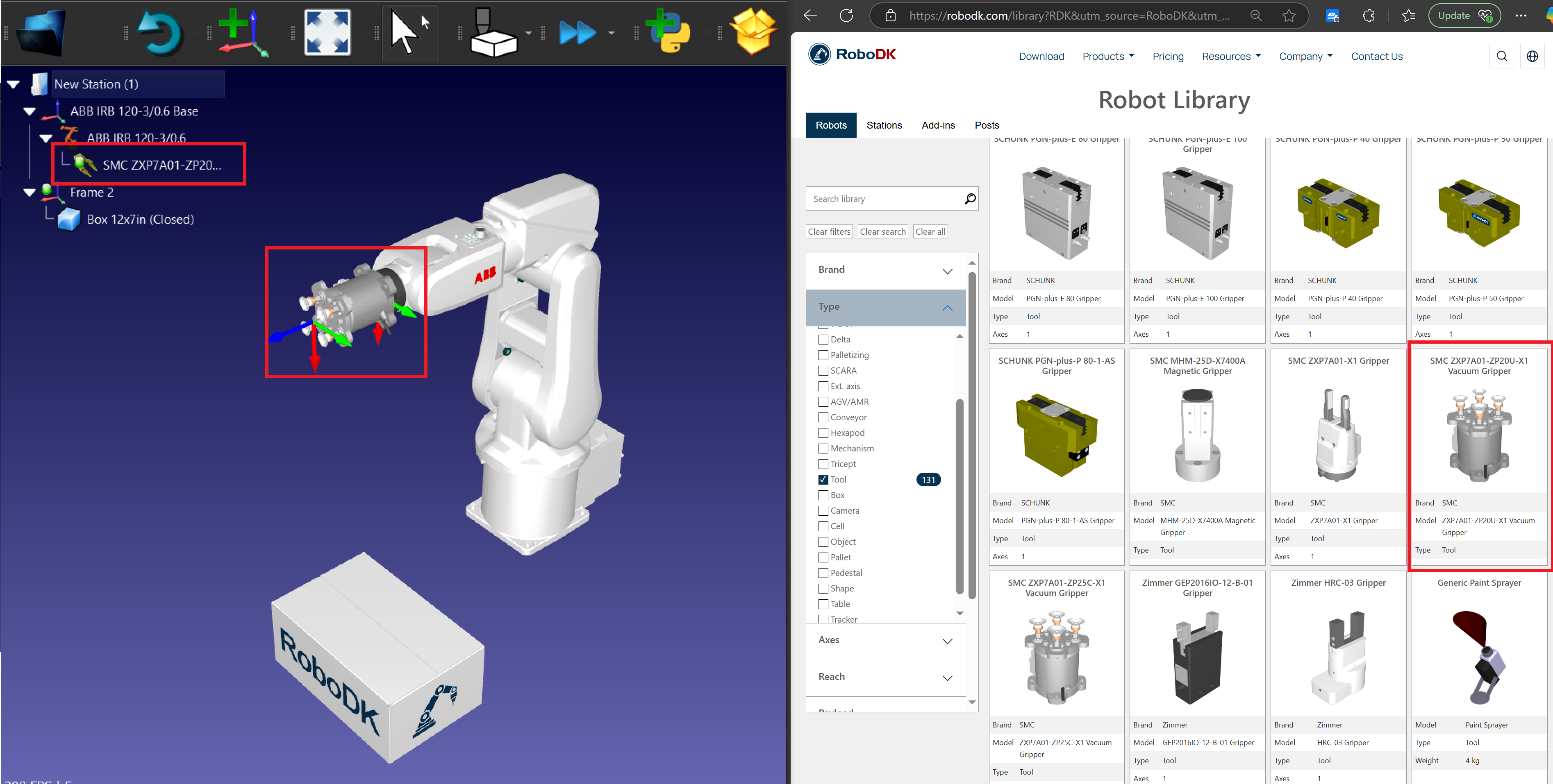
6.添加一个工具(夹爪)
a.选择夹爪:
i.在主菜单中选择程序 → 添加工具 (TCP)。
ii.从RoboDK在线资源库中选择夹爪,或导入自定义夹爪文件。
b.将工具安装到机器人上:
i.右键单击工作站树中的夹爪,选择 "附加到机器人"。
ii.选择合适的机器人法兰。
c.定义 TCP(工具中心点):双击工具,输入相对于机器人法兰的 TCP 坐标。