基础指南
RoboDK是一款应用于工业机器人仿真与离线编程的软件。离线编程功能意味着在电脑上编写机器人程序、经过仿真与调试之后,加载到机器人控制器后即可运行。
本章节是RoboDK教程的基础部分。本教程基于在Windows下运行的 RoboDK。
安装 RoboDK
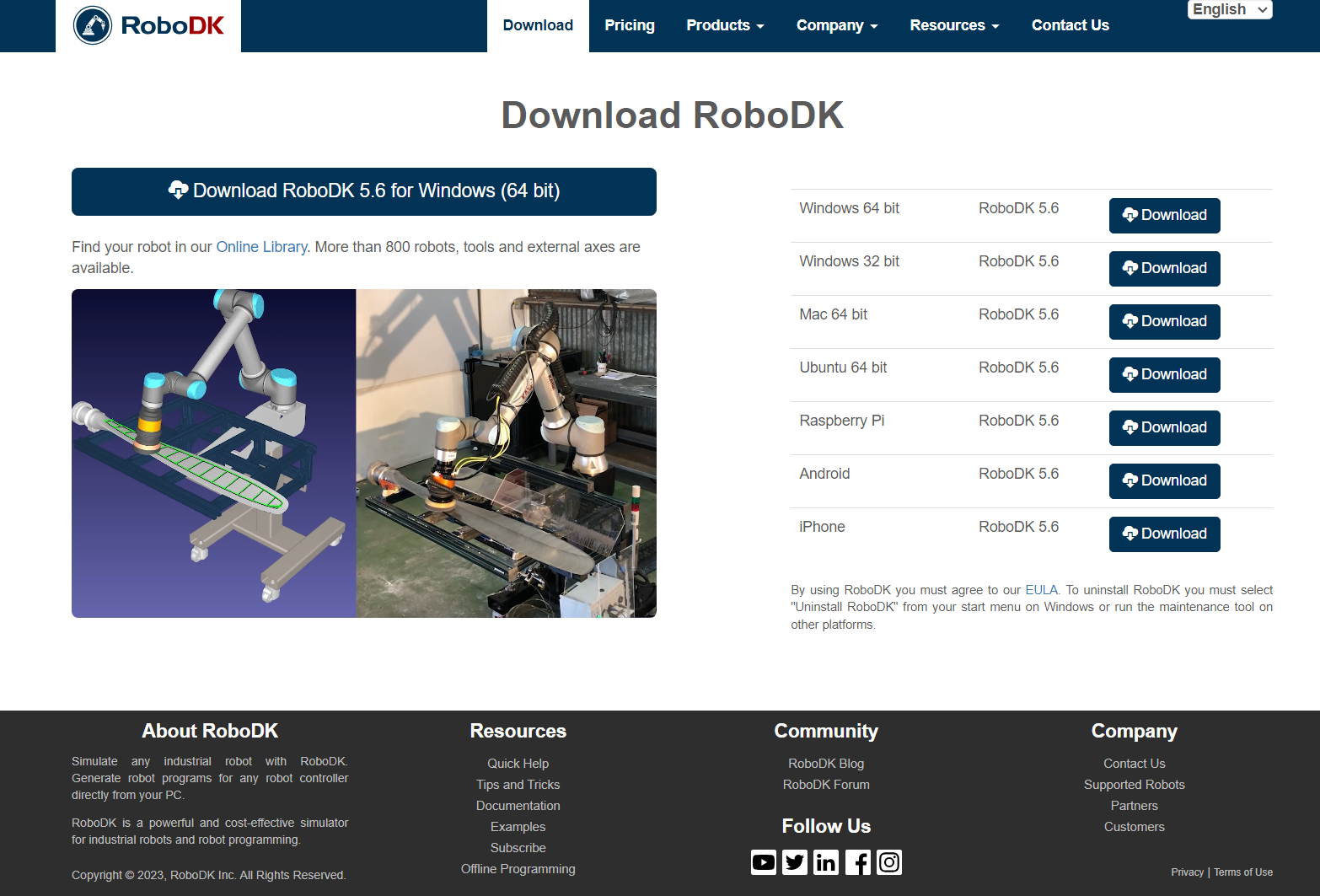
通过我们的网站下载并安装 RoboDK:https://robodk.com.cn/cn/download。填写完电子邮件后,就能立即访问并下载最新安装包。
RoboDK 适用于 Windows、Mac、Ubuntu、Android、iPhone iOS 和 Rasbperry Pi多个操作系统。此外,RoboDK还有一个更轻便、更简化的浏览器版本,名为RoboDK for Web。使用RoboDK for Web需要稳定的网络。
启动 RoboDK
双击桌面快捷图标启动 RoboDK。从我们的网站下载安装RoboDK后,桌面上会出现RoboDK的快捷图标,双击快捷图标即可启动RoboDK。

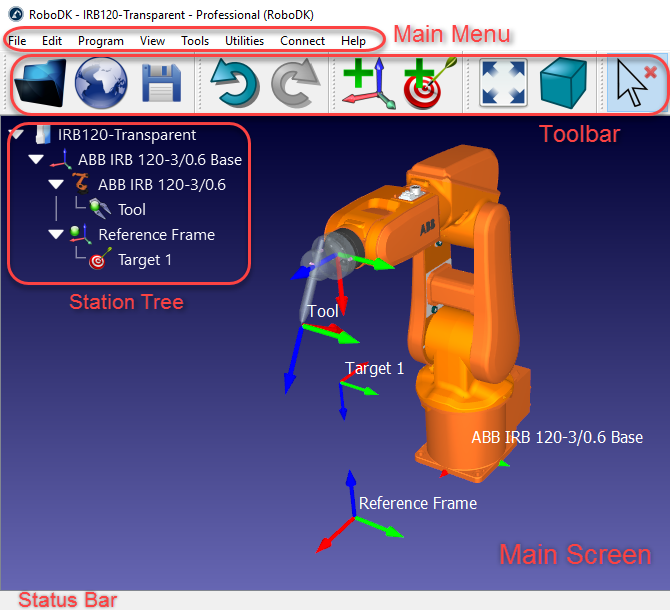
RoboDK界面内包括主菜单,工具栏,状态栏以及主要工作空间。左侧树形结构的工作站中显示了当前工作站内的所有项目,例如机器人,参考坐标系,机器人工具,机器人程序等等。更新信息详见界面。
点击文件➔
RoboDK的机器人资源库可以通过网站打开,也可以在RoboDK软件界面内打开。
RoboDK教程中使用三种颜色(图例)区分不同鼠标操作:
|
|
| |
左键点击 | 右键点击 | 双击 |



Video:以下视频总结了本文档中的步骤:
https://www.youtube.com/watch?v=xZ2_JEbS_E0&index=1&list=PLjiA6TvRACQd8pL0EnE9Djc_SCH7wxxXl
巡航
在3D环境中进行仿真操作时,需通过灵活的视角导航实现最佳观察效果。场景中的所有对象均基于固定世界坐标系(工作站基准坐标系),通过移动虚拟摄像机来调整观察视角。
我们建议使用3D鼠标(三键鼠标)在工作空间内进行立体视图检视。或者,可以使用Ctrl,Alt,Shift这三个按键结合鼠标左键来进行平移,旋转,缩放的动作:
选择 | 平移 | 旋转 | 缩放 |
|
|
|
|
|
|
|
|
左键单击 | 按住中键 | 按住右键 | 滚动滑轮 |
按住Ctrl 选择多个物体 | 按住 Ctrl + Alt | 按住 Ctrl+ Shift | 按住 Shift 键 |



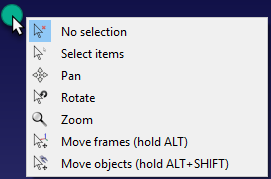
在软件界面中,右键单击空白处,即可唤出与鼠标操作等效的导航命令菜单。此功能专为无外接鼠标的笔记本用户设计。

Video:可以观看3D视图的视频解说https://www.youtube.com/watch?v=krsVm02NQFY。
入门指南
新建项目章节展示了如何在RoboDK中创建一个包含优傲UR10机器人的离线编程项目,实现喷涂应用。本范例概括了使用RoboDK仿真与离线编程的关键特点,包括:
1.如何在
2.如何
3.如何
4.如何
5.如何
6.如何
7.如何
8.如何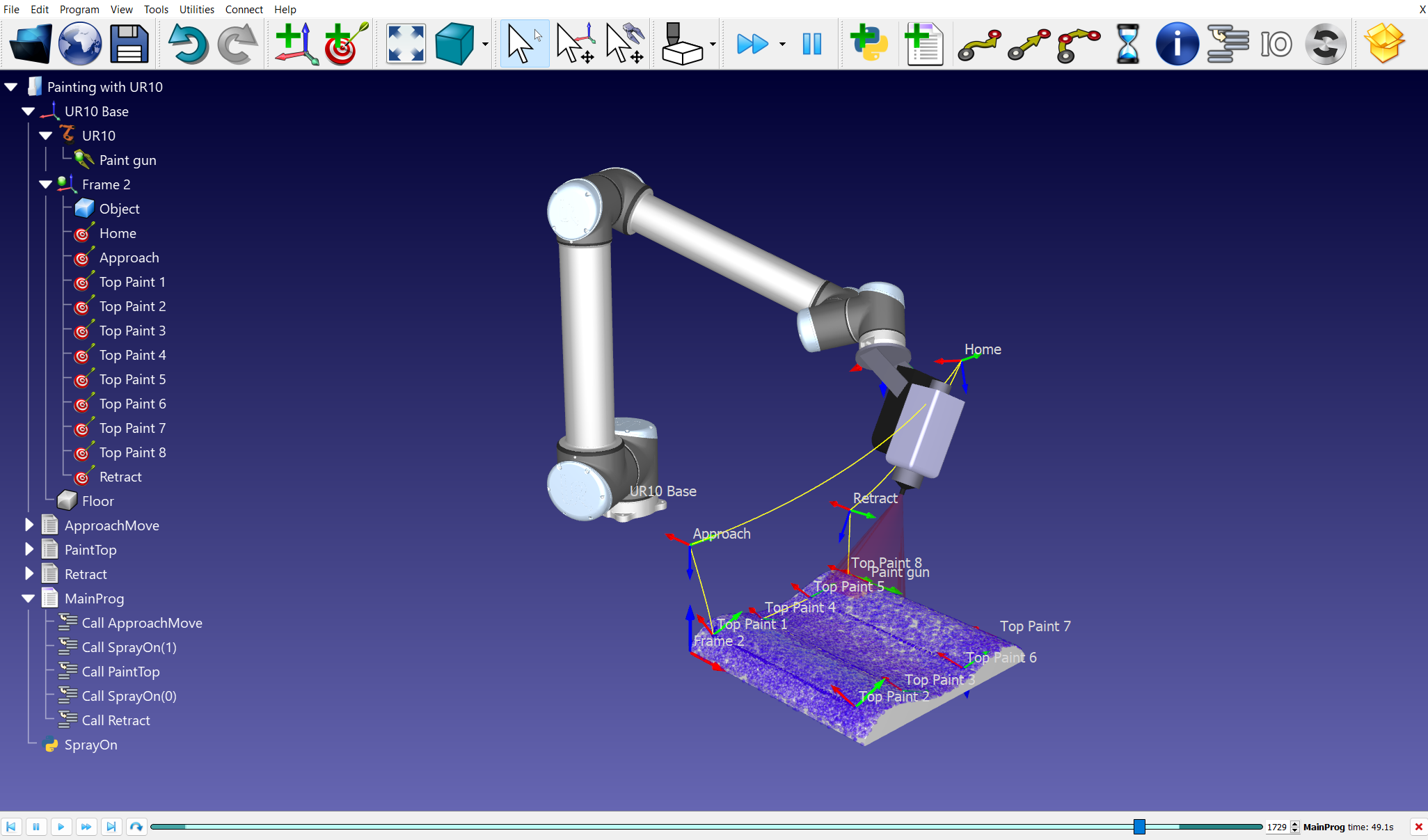
在RoboDK模型库中下载本范例,在RoboDK中打开本范例文件:Painting-with-UR10.rdk。
RoboDK 资源库
RoboDK 资源库汇集了机器人、范例、工具、外轴、插件和后处理器的资源。通过RoboDK 资源库下载机器人、查找范例、安装插件,或了解如何配置后处理器为控制器生成程序。
通过链接访问 RoboDK 资源库https://robodk.com.cn/cn/library。也可以在RoboDK 的工具栏中选择文件➔ 打开机器人库。
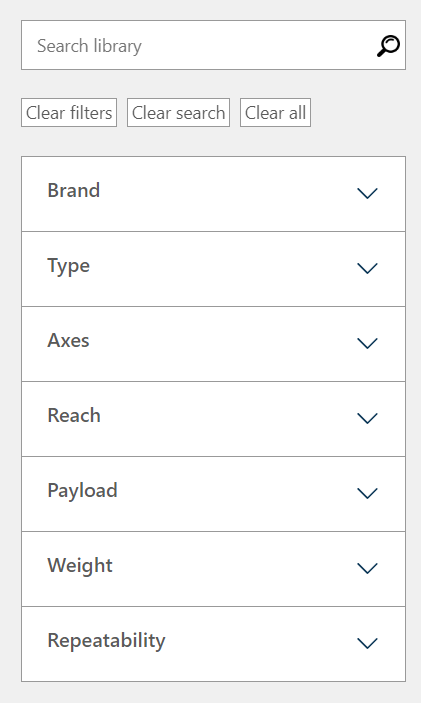
资源库搜索
使用 RoboDK 资源库顶部的搜索栏,即可搜索机器人、范例、插件或后处理器。
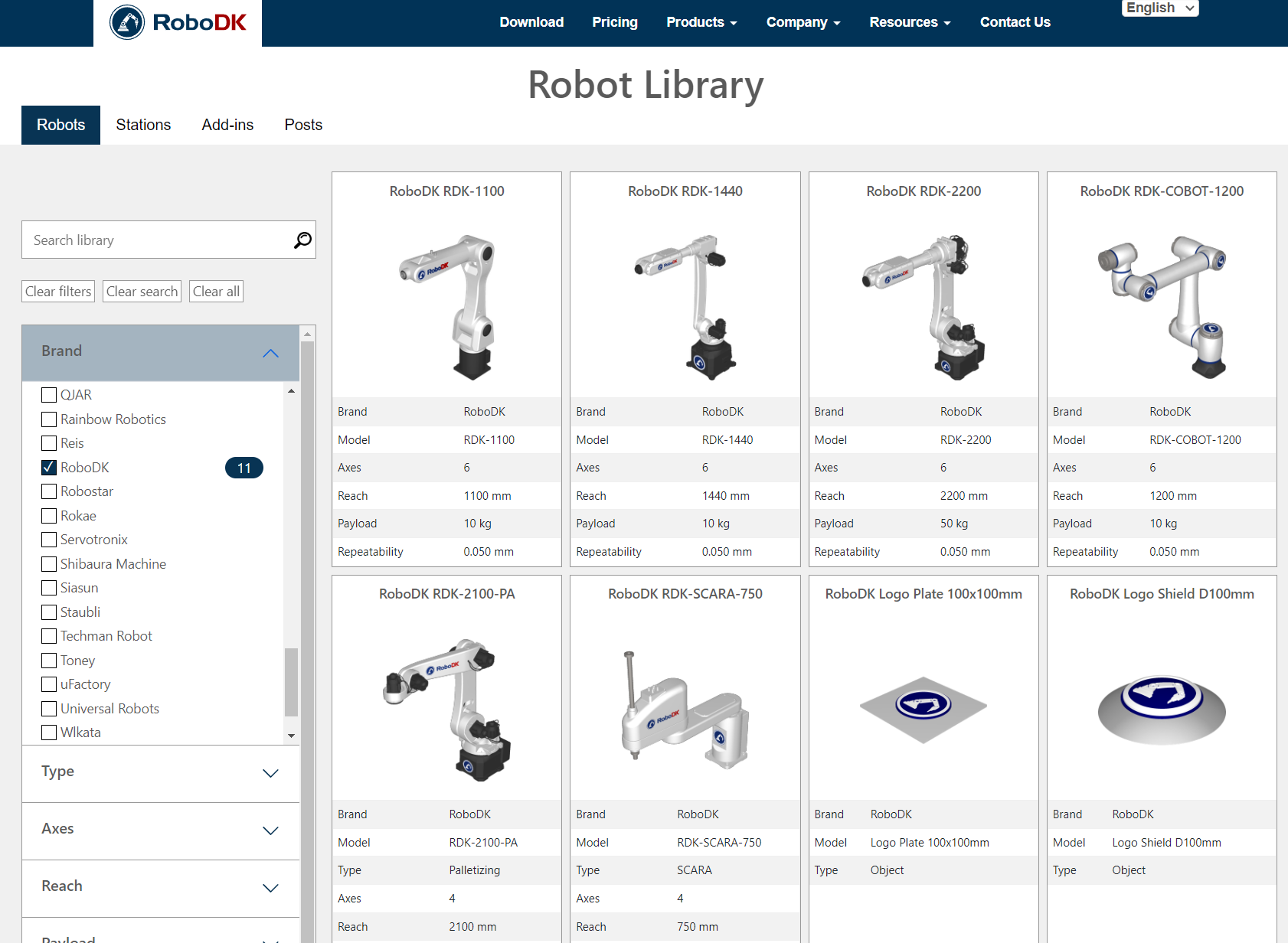
以搜索机器人为例,通过品牌、类型或其他条件进行筛选。
资源库类别
RoboDK资源库划分为多个功能板块,包括机器人模型库、工作站、插件及后处理器。

可以在资源库中找到以下部分或选项卡:
1.机器人部分提供大量机器人设备和配件。其中包括行业领先品牌的机械臂、Delta 机器人、码垛机器人和 SCARA 机器人等机器人型号。该类别还重点介绍转台、定位器、线性导轨和龙门架等外轴。在末端工具方面,可以找到从夹爪和焊接枪到分发器、打磨机、磨床、主轴、工具快换装置和法兰适配器等各种工具。此外,为配合各种仿场景,该类别还提供形状、瓶子、箱、码垛、基座、相机、台面和样品部件等通用物体,确保为项目中所有机器人的仿真需求提供广泛的选择。
2.工作站范例部分提供预配置的机器人应用范例,涵盖各类机器人应用场景、工具及技术。这些范例工作站可作为项目基础模板或开发参考,应用范围包括:增材制造(3D打印)、物料搬运、点胶/喷涂、切割/铣削/钻孔、打磨/机加工、喷涂/码垛、焊接及其他多种工业场景,确保用户获得全面、多样化的机器人应用参考。
3.在插件部分,提供用于扩展和定制RoboDK功能的各类插件,包括:应用程序(基于Python开发)、插件(基于C++接口)、以上均由RoboDK官方及第三方开发者提供的选项,有些插件为独立付费模块,需单独购买并集成至RoboDK软件。
4.后处理器,该部分列出RoboDK默认支持的后处理器,用于确保生成的机器人程序与不同品牌机械臂、控制器及CNC设备兼容。后处理器可将RoboDK程序转换为特定机器人控制器识别的代码格式,支持的品牌包括:ABB、发那科(Fanuc)、库卡(KUKA)、安川莫托曼(Yaskawa Motoman)、史陶比尔(Staubli)、优傲机器人(Universal Robots)等主流机器人平台,保证设备的兼容性。
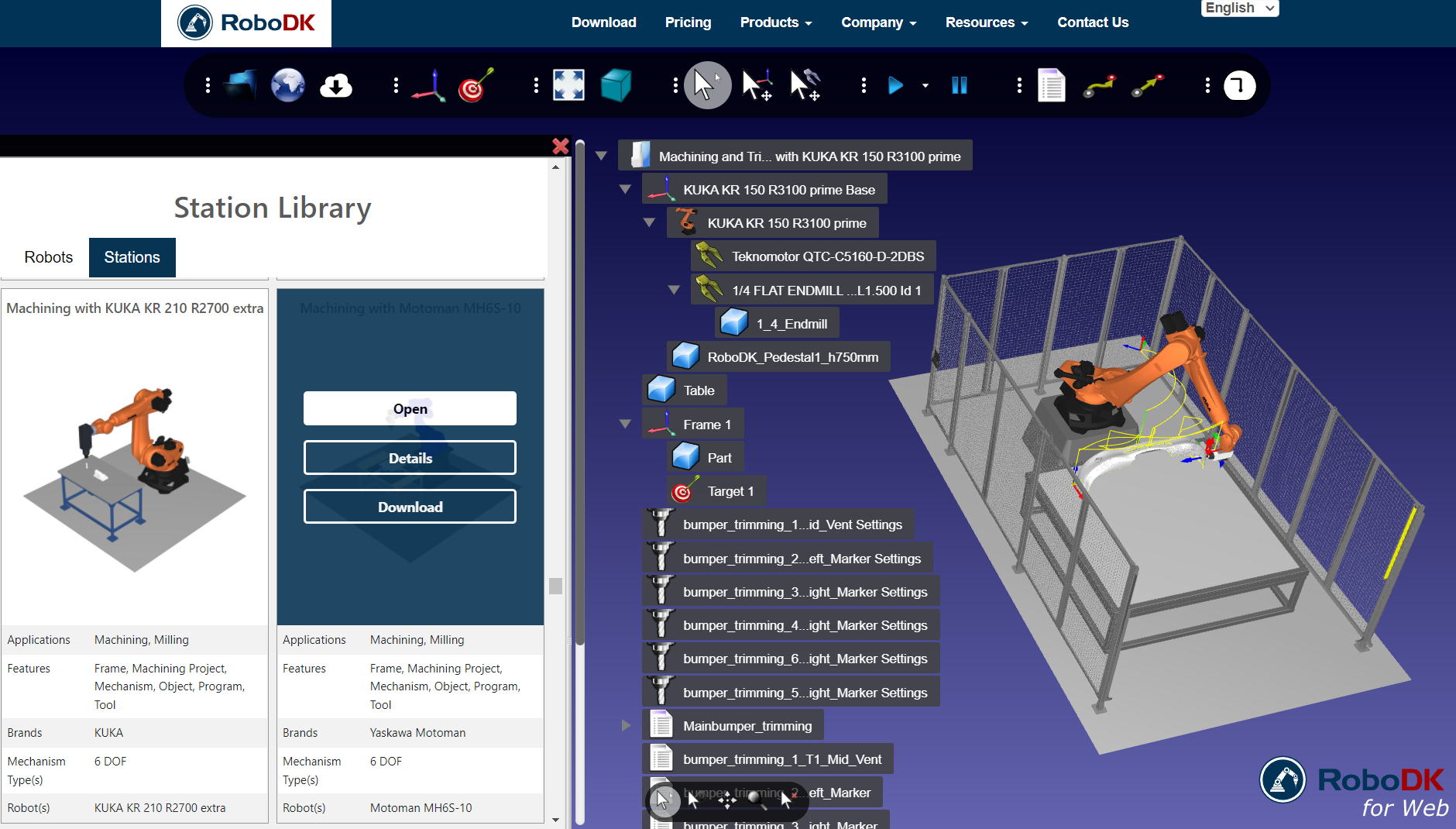
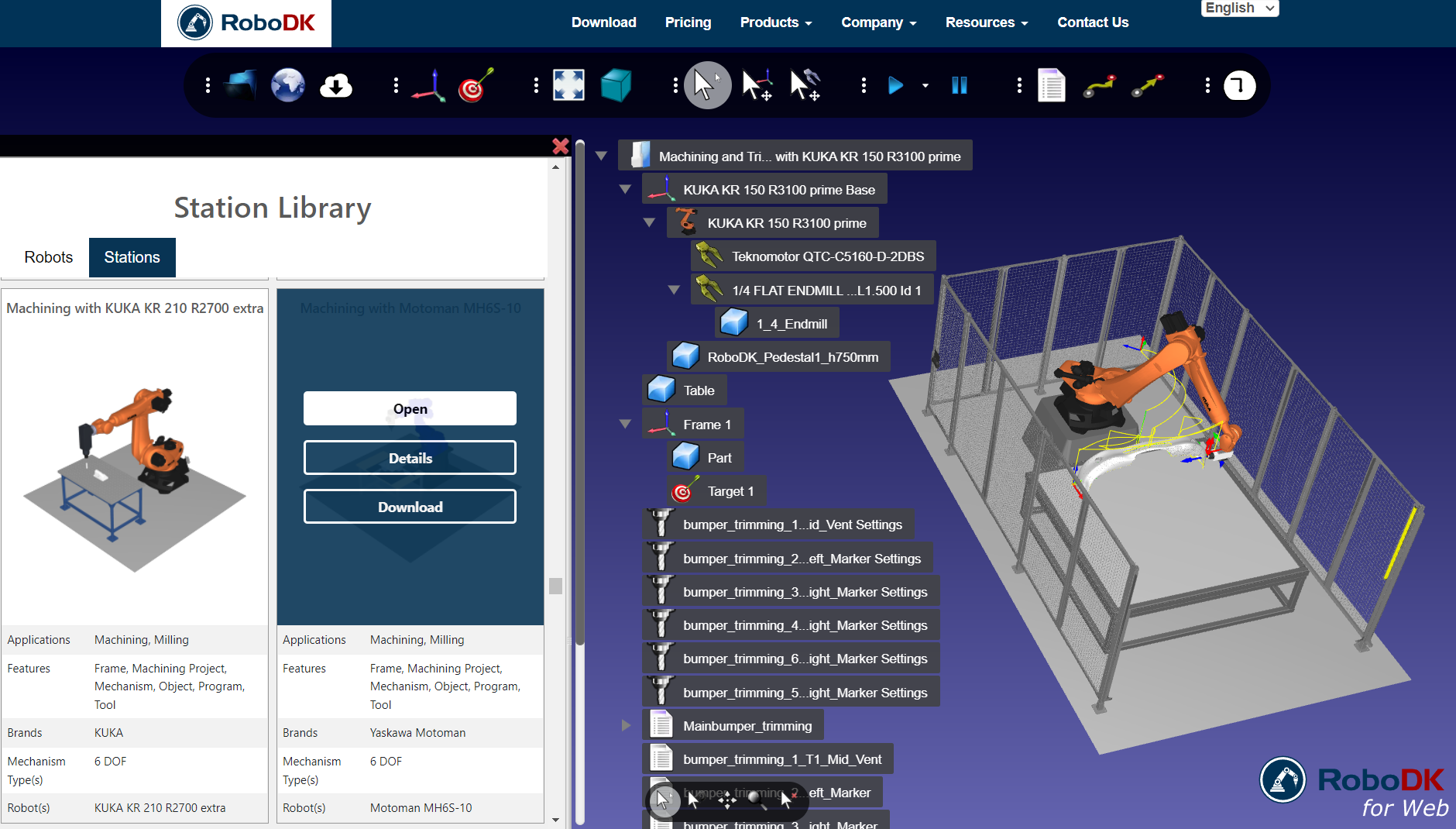
资源库操作
当鼠标悬停在库中的项目图片上时,会显示一个包含多个选项的菜单。
以下是菜单选项含义及操作:
1.详细:在新标签页中打开该项目的详细信息。
2.3D 视图:在RoboDK网页版(基于网页的RoboDK版本)中打开该项目。
3.下载:下载该项目的本地副本。
工具栏
工具栏包含了常用功能的快捷按钮。
RoboDK 5.7及更高版本采用全新设计的图标,可通过 工具➔选项➔一般➔使用现代图标启用。更多详情请参阅界面。
Tip:选择工具➔选项➔一般➔显示工具栏文本,就会展示工具栏的图标名称。
在默认设置下,工具栏中包含下面的命令:
传统 | 现代 |
|
|
| 打开 |
|
| 打开在线模型库 |
|
| 保存工作站 |
|
| 撤销 |
|
| 重做 |
|
| 添加参考坐标系 |
|
| 添加机器人目标 |
|
| Fit All全视图 |
|
| 等距视图 显示工作空间等距视图 |
|
| 移动坐标系 |
|
| 移动TCP(机器人工具中心点) |
|
| 碰撞检测 |
|
| 快速仿真 |
|
| 暂停仿真 |
|
| 添加机器人仿真程序 |
|
| 添加Python程序 |
|
| 关节运动指令 |
|
| 线性运动指令 |
|
| 导出仿真文件 |













捷径
下面列出了有用的快捷键,以及它们所代表的工具栏命令按钮:
Alt |
| 移动坐标系 |
Alt+Shift |
| 移动 TCP(工具中心点) |
F1 |
| 显示本帮助指南 |
F2 | 重新命名项目 | |
F6 |
| 为所选仿真程序生成机器人可读程序 |
F7 | 显示/隐藏所选项目 | |
Alt+0 |
| 选择项目后全景视图 |
Ctrl+1 | 加载最近一个文件或者工作站 | |
/ | 显示/隐藏文字 | |
+ | 放大坐标系 | |
− | 缩小坐标系 | |
* | 显示/隐藏机器人工作空间 |

参考坐标系
参考坐标系用于定义某个物体(如对象、机器人或其他坐标系)相对于另一个已知位置和方向物体的空间关系。所有离线编程软件都需要通过参考坐标系来确定物体相对于机器人的位置,从而同步更新仿真环境。
在工作站中,你可以通过拖放参考坐标系或物体来建立特定关联(例如嵌套坐标系,如下图所示)。
在机器人应用中,通常通过标定3个点来定义参考坐标系相对于机器人的位置,从而在虚拟空间中定位物体。此操作可通过机器人示教器或RoboDK完成(详见定义参考坐标系章节)。
在RoboDK内还可以手动输入平移与旋转数值,包括选取不同的欧拉角旋转顺序。
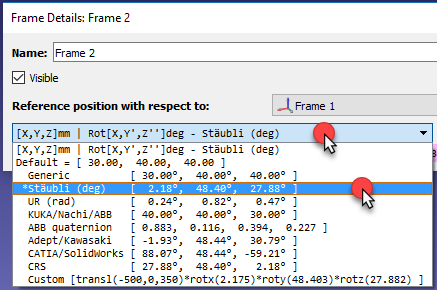
Note:参考坐标系之间的相对关系称为位姿(Pose),包含位置(Position)和方向(Orientation)。RoboDK支持多种表示方式,可以用XYZ位置和欧拉角表示方向,也可以用XYZ位置和四元数值表示,或者用一个4x4矩阵表示。
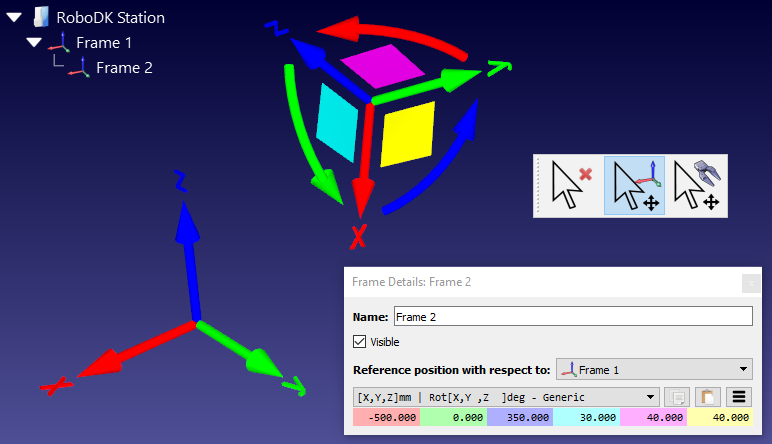
在默认设置下,RoboDK显示参考坐标系之间的关系为XYZ坐标,及X➔Y➔Z顺序的欧拉角格式。这意味着几何旋转将按照下面的顺序:
1.首先:围绕X轴旋转一个角度(浅蓝底色数值)
2.接着:围绕静态Y轴旋转一个角度(粉色底色数值)
3.最后:围绕静态Z轴旋转一个角度(黄色底色数值)
发那科(Fanuc)与安川(Motoman)机器人的控制器接受以上所描述的旋转格式。但是,其他机器人生产商使用的是不同的旋转顺序。
Note: RoboDK自动为每个机器人选择正确的旋转格式。
在参考坐标系详情窗口中(双击一个坐标系即可打开),可以从下拉菜单中选取不同的旋转格式。
Tip:生成机器人程序时,RoboDK会根据机器人型号自动匹配控制器所需的格式,并通过后处理器生成正确的程序代码,用户无需手动转换(更多信息详见机器人后处理器章节)。
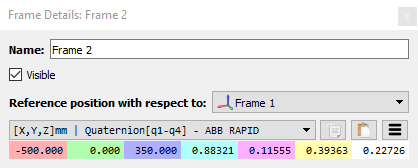
例如,史陶比尔(Stäubli)机器人使用X➔Y’➔Z’’顺序,库卡(KUKA)机器人与那智(Nachi)机器人使用Z➔Y’➔X’’顺序。另外,ABB机器人控制器使用四元数旋转格式,这需要4个数值来定义一个旋转:
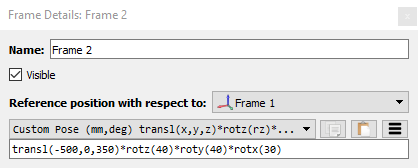
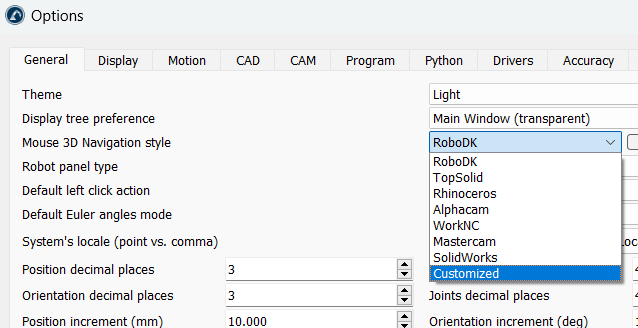
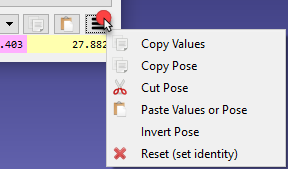
用户还可以自定义姿态格式。可通过脚本手动输入(选择"Script"选项),如下图所示:
RoboDK for Web
RoboDK for Web是基于云端的RoboDK软件版本。这一网页平台具有灵活性和便捷性,用户无需安装桌面版软件即可快速轻松地进行机器人仿真。
RoboDK for Web是RoboDK的轻量级版本,适用于快速仿真,通过导出仿真结果进行项目分享,新手体验RoboDK基础功能。如需进行工业级项目、深度仿真或使用高级功能,我们推荐使用 RoboDK桌面版。
访问RoboDK for Web的方法
- 打开任意网页浏览器。
- 输入RoboDK for Web地址:https://robodk.com/web。
RoboDK for Web的图标几乎与桌面版完全一致。如需了解更多信息,请参阅文档中的工具栏。
你也可以参考入门指南,进一步学习RoboDK的基础功能。
浏览资源库
在RoboDK for Web中点击打开机器人库图标,即可直接访问RoboDK资源库。可以看到一个包含机器人模型、工具和范例项目的窗口。
如需添加资源库的项目到界面,只需将鼠标悬停在对象上并点击"打开"。
双击项目即可开始仿真。同时还可以从本地文件中上传3D文件、创建新目标、进行仿真以及生成程序。
默认设置
在工具栏点击工具➔选项,选择设定默认设置可恢复默认设置。更多信息详见选项菜单章节。
在工具栏点击工具➔语言,为软件环境选择语言。
在工具栏点击工具➔工具栏布局➔设定默认工具栏,恢复工具栏默认设置。
在工具栏点击工具➔选项➔其他➔设定默认Python设置,恢复默认Python设置。更多信息详见RoboDK API章节。
请求支持
你可以在工具栏处点击帮助➔请求支持。
关于设置许可证的具体说明,请查阅许可证常见问题:
https://robodk.com.cn/cn/lic-FAQ。
Note:访问请求支持表单需要专业许可证。如果你没有专业许可证,你可以到RoboDK论坛提出问题。
RoboDK论坛是一个活跃的社区,你可以在这里提出问题,并得到RoboDK专家的解答。
RoboDK免费版可以帮助你完成文档中的大部分操作。使用机器人加工、机器人焊接项目、3D打印项目、高级 CAD转路径功能或保存复杂仿真等高级功能需要购买许可证。你可以在价格页面找到有关RoboDK定价的信息。
教育许可证只能由大学或学校购买。此外,教育许可证不得用于生产目的。
RoboDK要求
RoboDK对硬件无特殊要求,可兼容大多数计算机设备,支持 Windows、Mac 及 Linux 系统。
下表列出了推荐的硬件要求:
1.操作系统Windows Vista、Windows 7、Windows 8、Windows 10 或 Windows 11(32 位或 64 位版本)、Mac OS(64 位)、Ubuntu 16 或 Ubuntu 18(64 位)。
2.内存:至少 2 GB。建议 4GB 或更大。
3.显卡配置:显示屏分辨率至少1024x769像素。显卡驱动器应支持 OpenGL 3.0 或更高版本。推荐配备硬件加速 OpenGL 及独立显存的显卡。若以进程模式运行 RoboDK,则无需显卡支持。
4.硬盘空间:需要15GB的安装空间,至少1GB的剩余空间。
5.鼠标:需要双键鼠标,建议使用三键或带中间滚轮的双键鼠标。
6.网络:网络版许可证激活需联网(默认许可证类型),防火墙需开放 80 和 443 端口(仅网络版),可选 USB 加密狗许可证(无需网络)。
7. 附加软件:部分功能需额外安装配套软件(如机器人厂商提供的付费驱动),范例:若发那科(Fanuc)机器人未启用"ASCII上传"功能,需通过发那科(Fanuc)的 ROBOGUIDE 软件将发那科(Fanuc)LS 文件编译为 TP 文件。
Note:大多数硬件兼容性问题源于显卡驱动缺失或版本过旧,可通过命令行参数 -NOUI 以无界面进程模式启动 RoboDK。
RoboDK标准版许可证不包含以下功能(需单独购买):机器人校准、性能测试和其他外接测量系统的功能。这些功能作为单独选件出售(含相关更新与技术支持)。RoboDK许可证不包含任何测量系统或硬件设备。
排除问题
通过远程桌面连接或虚拟机运行时,RoboDK可能无法启动。为了解决这个问题,你可以双击位于C:/RoboDK/文件夹下的RoboDK-Safe-Start.bat文件来启动RoboDK。
使用该命令启动 RoboDK,此命令可解决远程桌面或虚拟机环境下的兼容性问题。
更多信息详见机器人连接故障排除章节,解决电脑与机器人之间的通信问题。